روبوت المتتبع للأجسام يعتمد على لوحة الأردوينو و مستشعر HC-SR04
محاور الدرس
1- ما هو روبوت المتتبع للأجسام ؟
2- كيف يعمل روبوت المتتبع للأجسام الذي يتم التحكم فيه بواسطة بطاقة الأردوينو ؟
3- مكونات روبوت المتتبع للأجسام
4- تجميع الروبوت المتتبع للأجسام
5- برمجة لوحة الأردوينو للتحكم في الروبوت
ما هو روبوت المتتبع للأجسام ؟
روبوت المتتبع للأجسام هو نظام أو جهاز يستخدم التقنيات الحديثة مثل الذكاء الصناعي والرؤية الحاسوبية لتتبع ومراقبة حركة الأشخاص أو الأجسام في بيئة معينة. يتم استخدامه في مجموعة متنوعة من التطبيقات مثل التصوير الفوتوغرافي والأمن والمراقبة والروبوتات الذكية وغيرها. يمكن أن يتضمن النظام استخدام كاميرات وأجهزة استشعار متعددة لتحديد مواقع الأشخاص وتتبع حركتهم بدقة.
عمل روبوت المتتبع للأجسام يعتمد على تكنولوجيا متعددة، وهنا نظرة عامة على كيفية عمله:
1- الاستشعار: يستخدم روبوت المتتبع للأجسام مجموعة متنوعة من الاستشعارات لتحديد مواقع الأجسام وتتبع حركتها. من بين هذه الاستشعارات: الكاميرات، وأجهزة الليدار، وأجهزة الاستشعار بالأشعة تحت الحمراء، والمستشعرات الأخرى التي تعتمد على تقنيات مثل الترددات اللاسلكية أو الأمواج فوق الصوتية.
2- التصوير الحاسوبي: يستخدم روبوت المتتبع للأجسام تقنيات التصوير الحاسوبي لتحليل الصور الملتقطة من الكاميرات. يمكنه استخدام خوارزميات الرؤية الحاسوبية لتحديد أشكال ومعالم الأشخاص وتتبع حركتهم.
3- المعالجة الحاسوبية والذكاء الصناعي: بعد استشعار البيانات، يتم معالجتها باستخدام الحوسبة والذكاء الصناعي لتحليل البيانات واستخلاص المعلومات الضرورية لتحديد مواقع الأجسام وتتبعها.
4- التحكم والتفاعل: استنادًا إلى البيانات التي تم جمعها وتحليلها، يتخذ الروبوت إجراءات محددة، مثل التحرك لمتابعة الشخص أو الجسم المستهدف، أو إصدار إنذار في حالة وجود حركة مشبوهة، أو تسجيل البيانات للاستخدام المستقبلي.
باختصار، يتكون عمل روبوت المتتبع للأجسام من تكامل مجموعة من التقنيات مثل الاستشعار، والتصوير الحاسوبي، والمعالجة الحاسوبية، والذكاء الصناعي لتحديد وتتبع الأجسام بفعالية في بيئة معينة.
كيف يعمل روبوت المتتبع للأجسام الذي يتم التحكم فيه بواسطة بطاقة الأردوينو ؟
روبوت المتتبع للأجسام الذي يتم التحكم فيه بواسطة بطاقة الأردوينو وأجهزة الاستشعار HC-SR04 ووحدة L298N يعمل بشكل متكامل كالتالي:
1- أجهزة الاستشعار HC-SR04:
تستخدم لاكتشاف المسافة بين الروبوت والأجسام المحيطة.
تعمل عن طريق إرسال نبضات فوق صوتية واستقبال الصدى لقياس المسافة.
يتم توصيلها ببطاقة الأردوينو لقراءة البيانات ومعالجتها.
2- وحدة L298N:
تستخدم للتحكم في المحركات وتوجيه الحركة للروبوت.
تحتوي على مشغلات للمحركات للتحكم في اتجاه الدوران وسرعته.
يتم توصيلها ببطاقة الأردوينو لتوجيه الإشارات للتحكم في المحركات.
عملية العمل تتبع الخطوات التالية:
1. استشعار المسافة:
يستخدم الروبوت أجهزة الاستشعار HC-SR04 لقياس المسافة إلى الجسم المستهدف وتحديد موقعه.
2. معالجة البيانات:
تقوم بطاقة الأردوينو بقراءة البيانات المقدمة من أجهزة الاستشعار ومعالجتها.
يتم تحويل هذه البيانات إلى توجيهات للتحكم في حركة الروبوت.
3. التحكم في الحركة:
يستخدم الروبوت وحدة L298N للتحكم في المحركات.
يتم توجيه الإشارات من بطاقة الأردوينو إلى وحدة L298N لتحديد اتجاه الحركة وسرعتها.
4. التتبع والتحكم:
بناءً على البيانات التي تم جمعها من أجهزة الاستشعار، يتحرك الروبوت باتجاه الجسم المستهدف.
مكونات روبوت المتتبع للأجسام
مكونات روبوت المتتبع للأجسام الذي يتم التحكم فيه بواسطة بطاقة الأردوينو وجهاز الاستشعار HC-SR04 ووحدة L298N تشمل:
1- لوحة الاردوينو:
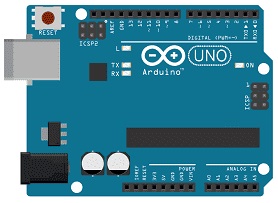
تعتبر وحدة المعالجة الرئيسية للروبوت، حيث تتولى مهام التحكم والتنسيق بين مكونات الروبوت.
2- جهاز الاستشعار HC-SR04:

يستخدم لقياس المسافة بين الروبوت والأجسام المستهدفة. يحتوي على مرسل للإشارات الفوق صوتية ومستقبل لاستقبالها وقياس الوقت اللازم لعودتها.
3- وحدة التحكم بالمحرك L298N:
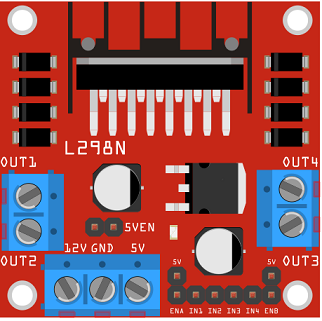
تستخدم للتحكم في حركة المحركات الموجودة في الروبوت، مثل المحركات الخاصة بالتنقل والدوران. توفر واجهة قوية لتوصيل المحركات وتوفير الطاقة لها، مما يسمح بتحكم دقيق في حركة الروبوت.
4- بطارية أو مصدر طاقة:

توفير الطاقة اللازمة لتشغيل الروبوت وجميع مكوناته.
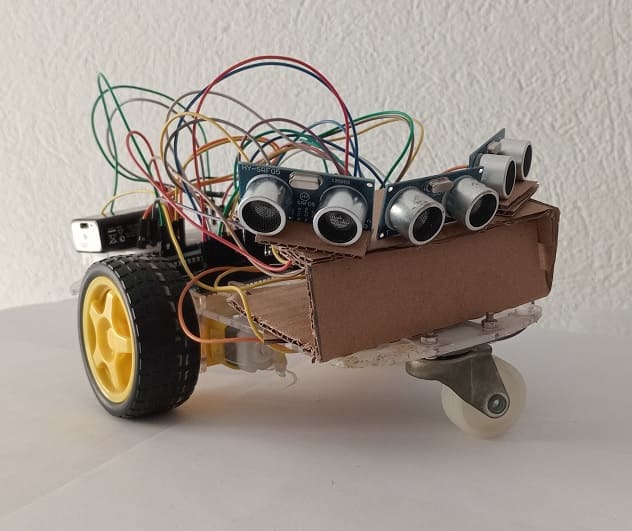
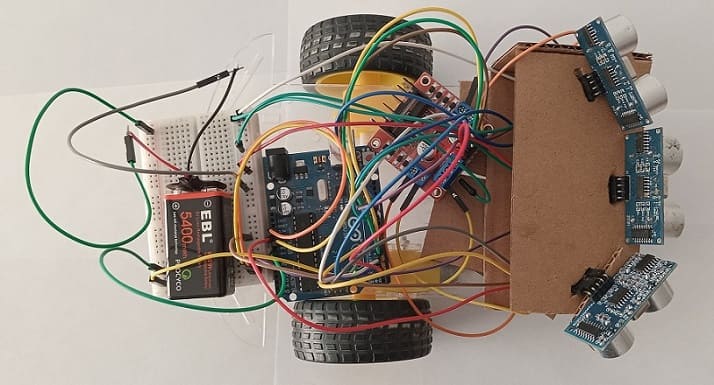
5- هيكل الروبوت:

الهيكل الذي يحتوي على جميع المكونات ويوفر الدعم اللازم لها، بما في ذلك العجلات أو المسارات والأجزاء الأخرى المطلوبة للحركة.
6- أسلاك التوصيل:

لتوصيل مكونات روبوت المتتبع للأجسام الذي يتم التحكم فيه بواسطة بطاقة الأردوينو
7- لوحة تجارب (Breadboard) :

لتسهيل توصيل المكونات والتجارب.
تجميع الروبوت المتتبع للأجسام
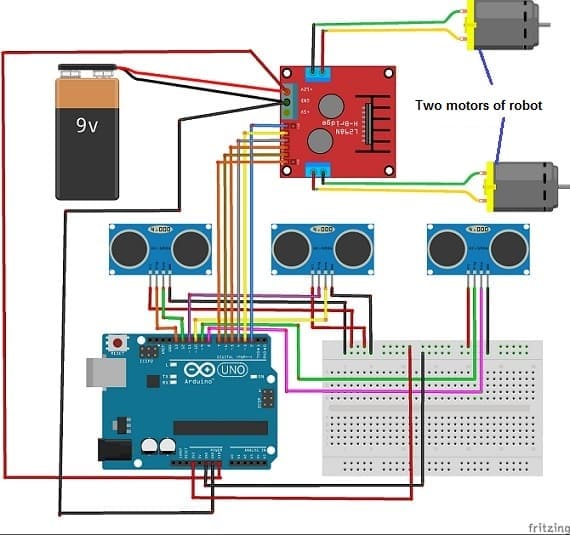
توصيل المستشعر الأول HC-SR04 بلوحة الأردوينو:
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص بلوحة الأردوينو.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص بلوحة الأردوينو.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ 8 الخاص بلوحة الأردوينو.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ 9 الخاص بلوحة الأردوينو.
توصيل المستشعر الثاني HC-SR04 بلوحة الأردوينو:
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص بلوحة الأردوينو.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص بلوحة الأردوينو.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ 10 الخاص بلوحة الأردوينو.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ 11 الخاص بلوحة الأردوينو.
توصيل المستشعر الثالث HC-SR04 بلوحة الأردوينو:
قم بتوصيل طرف VCC الخاص بمستشعر HC-SR04 بمنفذ 3.3V الخاص بلوحة الأردوينو.
قم بتوصيل طرف GND الخاص بمستشعر HC-SR04 بمنفذ GND الخاص بلوحة الأردوينو.
قم بتوصيل طرف Echo الخاص بمستشعر HC-SR04 بمنفذ 12 الخاص بلوحة الأردوينو.
قم بتوصيل طرف Trig الخاص بمستشعر HC-SR04 بمنفذ 13 الخاص بلوحة الأردوينو.
توصيل وحدة L298N بلوحة الأردوينو
قم بتوصيل الدبوس رقم 2 من بطاقة الأردوينو بمنفذ ENA الخاص بوحدة L298N
قم بتوصيل الدبوس رقم 3 من بطاقة الأردوينو بالدبوس IN1 الخاص بوحدة L298N.
قم بتوصيل الدبوس رقم 4 من بطاقة الأردوينو بالدبوس IN2 الخاص بوحدة L298N.
قم بتوصيل الدبوس رقم 5 من بطاقة الأردوينو بالدبوس IN3 الخاص بوحدة L298N.
قم بتوصيل الدبوس رقم 6 من بطاقة الأردوينو بالدبوس IN4 الخاص بوحدة L298N.
قم بتوصيل الدبوس رقم 7 من بطاقة الأردوينو بدبوس ENB الخاص بوحدة L298N.
قم بتوصيل طرف GND الخاص بلوحة الأردوينو بمنفذ GND الخاص بوحدة L298N.
إمدادات الطاقة للروبوت
قم بتوصيل طرف Vin الخاص بلوحة الأردوينو بالطرف الموجب للبطارية 9 فولت
قم بتوصيل طرف GND الخاص بلوحة الأردوينو بالطرف السالب لبطارية 9 فولت
قم بتوصيل طرف 12 فولت من وحدة L298N بالطرف الموجب للبطارية 9 فولت
قم بتوصيل محركي الروبوت بوحدة L298N
برمجة لوحة الأردوينو للتحكم في الروبوت
أولًا، تأكد قبل استخدام البرنامج الأردوينو من تحميل مكتبة Ultrasonic
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 |
#include "Ultrasonic.h" // مستشعر HC-SR04 على اليمين Ultrasonic ultrasonic_right(13, 12); // Trig and Echo // مستشعر HC-SR04 في المركز Ultrasonic ultrasonic(11, 10); // Trig and Echo // مستشعر HC-SR04 على اليسار Ultrasonic ultrasonic_left(9, 8); // Trig and Echo int enA = 2; int in1 = 3; int in2 = 4; // motor two int enB = 7; int in3 = 5; int in4 = 6; void setup() { // ضبط دبابيس GPIO لوحدة L298N pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); analogWrite(enA, 150); analogWrite(enB, 150); } void loop() { // إعداد أجهزة الاستشعار الثلاثة HC-SR04 int distance_right = ultrasonic_right.Ranging(CM); int distance = ultrasonic.Ranging(CM); int distance_left = ultrasonic_left.Ranging(CM); if ((distance <50) && (distance >10 )) { // إذا تم اكتشاف الجسم بواسطة المستشعر الموجود في الوسط digitalWrite(in1, HIGH); // حرك الروبوت للأمام digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(50); digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(30); } if ((distance <10) && (distance >1 )) { // إذا كان الجسم قريبًا جدًا digitalWrite(in1, LOW); // تحريك الروبوت للخلف digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(50); digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(30); } if ((distance_right <50) && (distance_right >5 )) { // إذا تم اكتشاف الجسم بواسطة المستشعر الموجود على اليمين digitalWrite(in1,HIGH ); // يستدير الروبوت إلى اليمين digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(60); digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(30); } if ((distance_left <50) && (distance_left >5 )) { // إذا تم اكتشاف الجسم بواسطة المستشعر الموجود على اليسار digitalWrite(in1, LOW); // يستدير الروبوت إلى اليسار digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(60); digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(30); } if ((distance_right >50) && (distance >50 ) && (distance_left >50 )) { // لم يتم الكشف عن أي شيء digitalWrite(in1, LOW); // يتوقف الروبوت digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } } |
0 تعليق
اترك تعليقا
شغف بالروبوتات

الدروس الحديثة





ورشة الروبوتات

دروس الأكثر قراءة




صنع روبوتات

دروس الأكثر تعليق




ذراع آلية

Categories
المنزل الذكي