Balance numérique avec ESP8266 NodeMCU et module HX711

Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage de la balance
4- Programmation de la carte ESP8266 NodeMCU
Présentation du projet
Objectif du projet
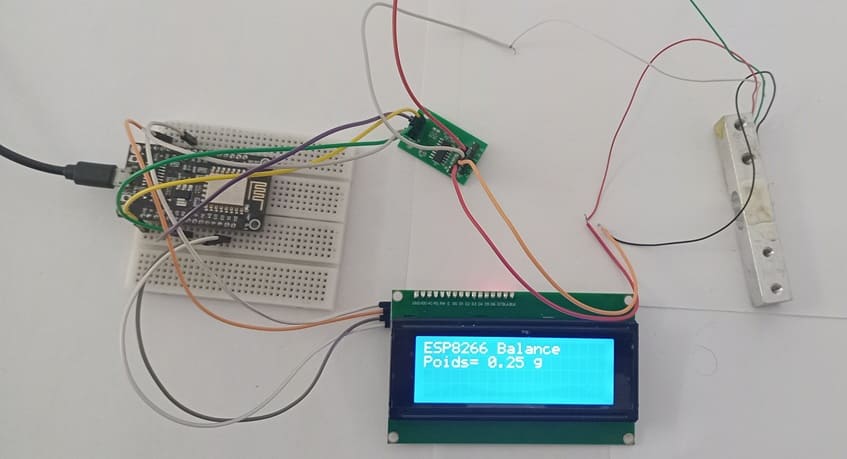
L’objectif de ce projet est de réaliser une balance numérique électronique en utilisant la carte ESP8266 NodeMCU, le module amplificateur HX711, un capteur de force (load cell) et un LCD 16x2 I2C. Cette balance permet de mesurer avec précision le poids d’un objet et d’afficher la valeur directement sur l’écran LCD. Le projet a aussi pour but de montrer comment interfacer un capteur analogique très sensible avec un microcontrôleur et comment afficher les données mesurées sur un afficheur I2C en temps réel.
Fonctionnement du projet :
Le fonctionnement de la balance repose sur le capteur de charge (load cell) qui détecte la force exercée par l’objet placé sur la plateforme. Cette force est convertie en un très faible signal électrique. Le module HX711 amplifie ce signal et le convertit en données numériques exploitables par la carte ESP8266 NodeMCU. Le microcontrôleur lit ensuite ces données, applique un facteur de calibration pour convertir la valeur en poids (grammes), puis envoie le résultat vers l’afficheur LCD I2C. L’écran affiche alors le poids mesuré en temps réel, généralement en grammes (g), permettant à l’utilisateur de lire facilement la mesure.
Matériel nécessaire
1- Carte ESP32
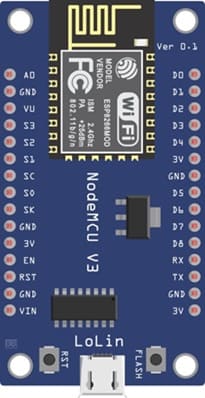
La carte ESP8266 NodeMCU est une carte de développement basée sur le microcontrôleur ESP8266. Elle sert de cerveau du système. Elle lit les données envoyées par le module HX711, effectue les calculs nécessaires pour déterminer le poids et envoie le résultat à l’afficheur LCD.
2. Capteur HX711
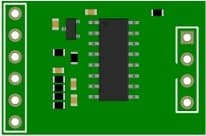
Le capteur HX711 est un module spécialisé conçu pour les systèmes de pesage. Il amplifie les faibles signaux électriques provenant de la cellule de poids et les convertit en données numériques lisibles par la carte ESP8266 NodeMCU.
3. Cellule de poids (Load Cell)

La cellule de poids est un capteur qui mesure la force ou le poids appliqué. Elle contient des jauges de contrainte qui changent de résistance lorsqu’une force est appliquée.
4. Afficheur LCD I2C
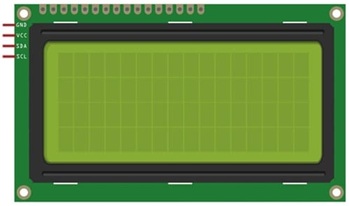
L’afficheur LCD I2C permet d’afficher le poids mesuré de manière claire et lisible.
5. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
6- Breadboard (Plaque d'essai) :

Une breadboard est utile pour créer un circuit temporaire et connecter facilement les composants entre eux.
Schéma de câblage de la balance
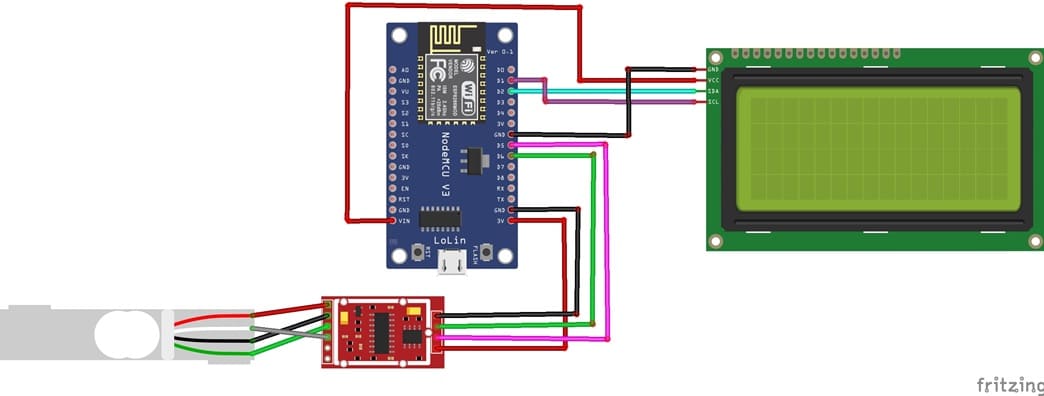
1- Connexion du capteur HX711 à la carte ESP8266
| Capteur HX711 | Carte ESP8266 |
|---|---|
| VCC | 3V |
| GND | GND |
| DT | D6 (GPIO 12) |
| SCK | D5 (GPIO 14) |
2- Connexion du cellule de poids au capteur HX711
| Cellule de poids | capteur HX711 |
|---|---|
| Rouge | E+ |
| Noir | E- |
| Blanc | A- |
| Vert | A+ |
3- Connexion de l’afficheur LCD I2C à la carte ESP8266
| Afficheur LCD I2C | Carte ESP8266 |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | D2 (GPIO 4) |
| SCL | D1 (GPIO 5) |
Programmation de la carte ESP8266 NodeMCU
Ce programme MicroPython permet de réaliser une balance électronique numérique en utilisant la carte ESP8266 NodeMCU, le module HX711, une cellule de charge et un afficheur LCD I2C. Il mesure le poids d’un objet et l’affiche en temps réel sur l’écran LCD.
On commence par l’importation de ces bibliothèques:
i2c_lcd et lcd_api → pour afficher les informations sur l’écran LCD I2C
hx711.py → pour contrôler le module HX711
Voici le code en Micropython qui implémente le fonctionnement du système :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 |
# Importation des classes nécessaires pour utiliser les broches et la communication I2C from machine import Pin, I2C , SoftI2C # Importation de la bibliothèque pour contrôler l'afficheur LCD I2C from i2c_lcd import I2cLcd # Importation du module time pour les temporisations import time # Importation de la bibliothèque du module HX711 (utilisé avec la cellule de charge) from hx711 import HX711 # Adresse I2C du module LCD (souvent 0x27 ou 0x3F) I2C_ADDR = 0x27 # Nombre de lignes et de colonnes de l'afficheur LCD totalRows = 4 totalColumns = 20 # === Initialisation du LCD I2C === # Création du bus I2C logiciel pour la carte ESP8266 # SCL connecté à la broche GPIO5 # SDA connecté à la broche GPIO4 i2c = SoftI2C(scl=Pin(5), sda=Pin(4), freq=10000) # Création de l'objet LCD avec l'adresse I2C et la taille de l'écran lcd = I2cLcd(i2c, I2C_ADDR, totalRows, totalColumns) # Effacer l'écran LCD au démarrage lcd.clear() # Afficher un message de démarrage sur la première ligne lcd.putstr("ESP8266 Balance") # Initialisation du module HX711 # d_out connecté à la broche GPIO12 # pd_sck connecté à la broche GPIO14 driver = HX711(d_out=12, pd_sck=14) # Boucle principale (fonctionne en continu) while True: # Lecture de la valeur brute du capteur HX711 # Conversion en poids avec un facteur de calibration poids = abs(183200 - driver.read()) / 238 - 45 # Positionner le curseur au début de la deuxième ligne lcd.move_to(0, 1) # Effacer la ligne pour éviter les anciens caractères lcd.putstr(" ") # Replacer le curseur au début de la deuxième ligne lcd.move_to(0, 1) # Afficher le poids mesuré arrondi à deux chiffres après la virgule lcd.putstr("Poids= " + str(round(poids, 2)) + " g") |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






