Système de mesure du niveau d’eau avec ESP8266 NodeMCU et HC-SR04
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte ESP8266 NodeMCU
Présentation du projet
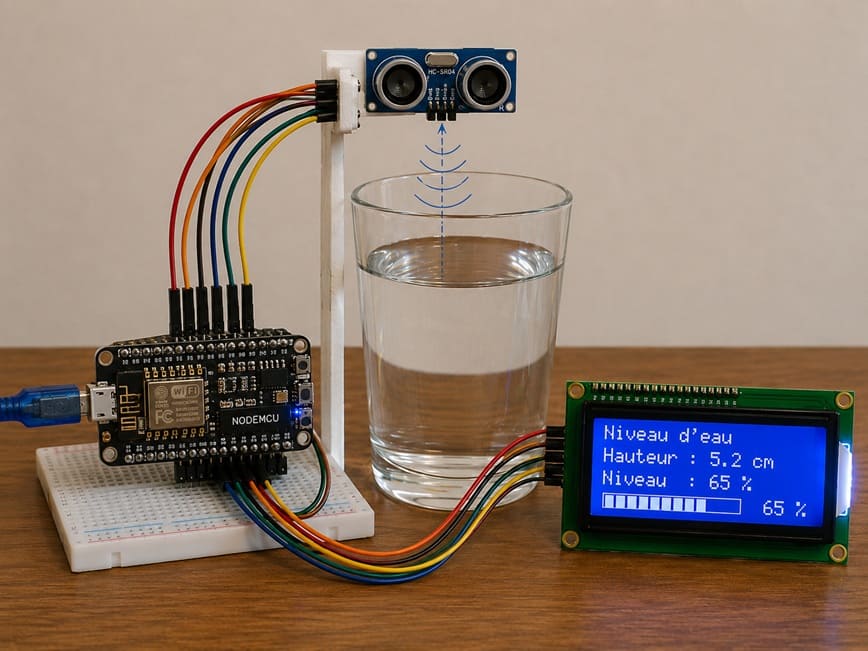
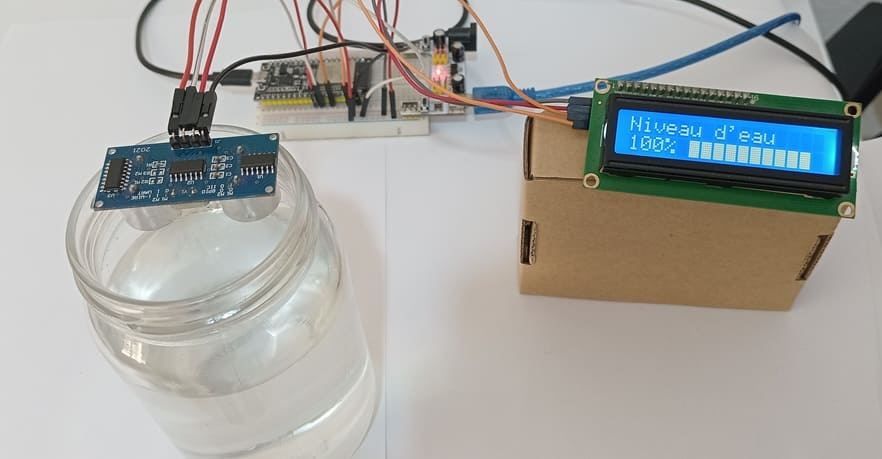
Le système de mesure du niveau d’eau avec la carte ESP8266 NodeMCU et le capteur ultrasonique HC-SR04 a pour objectif de mesurer automatiquement la hauteur de l’eau dans un récipient ou un réservoir et d’afficher les résultats en temps réel.
Ce système permet :
- de surveiller le niveau d’eau de manière intelligente et automatique ;
- d’éviter le débordement ou le manque d’eau ;
- d’obtenir des mesures précises sans contact direct avec l’eau ;
- d’afficher les informations sur un écran LCD ou une application mobile ;
- d’utiliser la connectivité Wi-Fi de l’ESP8266 pour des applications IoT.
Fonctionnement du système
Le fonctionnement du système repose sur l’utilisation du capteur ultrasonique HC-SR04 et de la carte ESP8266 NodeMCU.
1- Le capteur HC-SR04 émet des ondes ultrasoniques vers la surface de l’eau.
2- Ces ondes se réfléchissent sur l’eau et reviennent vers le capteur.
3- Le capteur mesure le temps nécessaire pour le retour de l’écho.
4- L’ESP8266 NodeMCU calcule la distance entre le capteur et la surface de l’eau à partir du temps mesuré.
5- En utilisant la hauteur totale du réservoir, le système détermine le niveau d’eau présent dans le récipient.
6- Les résultats sont ensuite affichés sous forme de valeurs numériques ou de barres graphiques sur un afficheur LCD.
Grâce au module Wi-Fi intégré de l’ESP8266 NodeMCU, les données peuvent également être envoyées vers une application mobile ou une plateforme IoT pour une surveillance à distance en temps réel.
Matériel nécessaire
1- Carte ESP8266 NodeMCU
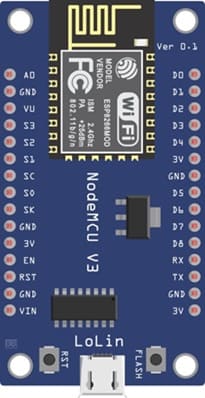
La carte ESP8266 NodeMCU est un microcontrôleur doté d’un module Wi-Fi intégré. Elle permet de contrôler l’ensemble du système, de traiter les données du capteur HC-SR04 et d’afficher les résultats.
2. Capteur ultrasonique HC-SR04

Le capteur HC-SR04 sert à mesurer la distance entre le capteur et la surface de l’eau. Il fonctionne en envoyant des ultrasons puis en recevant leur écho après réflexion sur l’eau. La distance mesurée permet ensuite de déterminer le niveau d’eau dans le récipient.
3. Afficheur LCD I2C
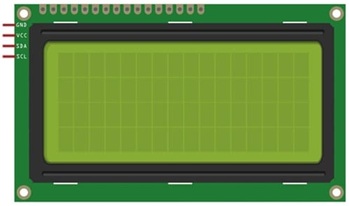
L’afficheur LCD I2C permet d’afficher les informations du projet de manière claire et instantanée. Dans ce système, il affiche le niveau d’eau détecté par le capteur HC-SR04 sous forme de barres graphiques qui augmentent ou diminuent selon la quantité d’eau présente dans le verre.
4. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
5. Plaque d'essai
La plaque d’essai (breadboard) permet de réaliser des montages électroniques sans soudure.
Schéma de câblage du système du système
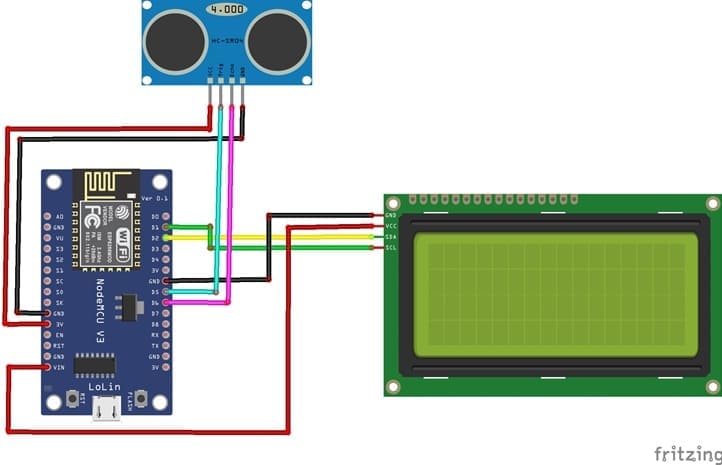
1- Connexion du capteur HC-SR04 à la carte ESP8266 NodeMCU
| Capteur HC-SR04 | ESP8266 NodeMCU |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | D14 |
| Echo | D12 |
2- Connexion de l’afficheur LCD I2C à la carte ESP8266 NodeMCU
| Afficheur LCD I2C | ESP8266 NodeMCU |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | D2 |
| SCL | D1 |
Programmation de la carte ESP8266 NodeMCU
Ce programme en MicroPython permet de réaliser un système intelligent de mesure du niveau d’eau à l’aide d’une carte ESP8266 NodeMCU, d’un capteur ultrasonique HC-SR04 et d’un afficheur LCD I2C.
On commence par l’importation de ces bibliothèques:
i2c_lcd et lcd_api → pour afficher les informations sur l’écran LCD I2C
Voici le code en Micropython qui implémente le fonctionnement du système :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 |
# ========================================================= # Importation des bibliothèques nécessaires # ========================================================= from machine import Pin, I2C, time_pulse_us from time import sleep, sleep_us from i2c_lcd import I2cLcd # ========================================================= # CONFIGURATION I2C ET AFFICHEUR LCD # ESP8266 NodeMCU : # SCL = D1 (GPIO5) # SDA = D2 (GPIO4) # ========================================================= # Initialisation du bus I2C i2c = I2C(scl=Pin(5), sda=Pin(4), freq=100000) # Initialisation de l'afficheur LCD I2C # Adresse I2C = 0x27 # LCD : 2 lignes x 16 colonnes lcd = I2cLcd(i2c, 0x27, 2, 16) # ========================================================= # CONFIGURATION DU CAPTEUR ULTRASONIQUE HC-SR04 # ========================================================= # Broche TRIG connectée à D5 (GPIO14) # Sert à envoyer les ultrasons TRIG = Pin(14, Pin.OUT) # Broche ECHO connectée à D6 (GPIO12) # Sert à recevoir l’écho des ultrasons ECHO = Pin(12, Pin.IN) # Hauteur maximale du réservoir en cm MAX_HEIGHT = 6.5 # ========================================================= # CREATION DES BARRES GRAPHIQUES PERSONNALISÉES # ========================================================= # Chaque tableau représente une barre graphique # de remplissage pour l'affichage LCD bar_chars = [ # Barre vide bytearray([0,0,0,0,0,0,0,0]), # Barre remplie à 20% bytearray([16,16,16,16,16,16,16,16]), # Barre remplie à 40% bytearray([24,24,24,24,24,24,24,24]), # Barre remplie à 60% bytearray([28,28,28,28,28,28,28,28]), # Barre remplie à 80% bytearray([30,30,30,30,30,30,30,30]), # Barre complètement remplie bytearray([31,31,31,31,31,31,31,31]) ] # Enregistrement des caractères personnalisés dans le LCD for i in range(6): lcd.custom_char(i, bar_chars[i]) # Affichage du titre sur la première ligne du LCD lcd.move_to(0, 0) lcd.putstr("Niveau d'eau ") # ========================================================= # FONCTION DE MESURE DE DISTANCE # ========================================================= def measure_distance(): # Mise à LOW de TRIG TRIG.off() sleep_us(2) # Envoi d'une impulsion de 10 microsecondes # pour déclencher les ultrasons TRIG.on() sleep_us(10) TRIG.off() # Mesure de la durée de l'écho reçu duration = time_pulse_us(ECHO, 1, 30000) # Vérification si aucune mesure n'est reçue if duration < 0: return 0 # Calcul de la distance en cm # Vitesse du son = 0.034 cm/us distance = (duration * 0.034) / 2 return distance # ========================================================= # FONCTION MAP # Convertit une valeur d'une plage vers une autre # ========================================================= def map_value(x, in_min, in_max, out_min, out_max): return int( (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min ) # ========================================================= # BOUCLE PRINCIPALE # ========================================================= while True: # Mesure de la distance entre le capteur et l’eau distance = measure_distance() # Calcul du niveau réel d’eau # 2.3 cm représente la distance du capteur # au bord supérieur du réservoir water_level = MAX_HEIGHT - (distance - 2.3) # Limitation du niveau minimum if water_level < 0: water_level = 0 # Limitation du niveau maximum if water_level > MAX_HEIGHT: water_level = MAX_HEIGHT # Conversion du niveau d’eau en pourcentage percent = int((water_level / MAX_HEIGHT) * 100) # Affichage du pourcentage sur le LCD lcd.move_to(0, 1) lcd.putstr(str(percent) + "% ") # Nombre total de barres graphiques total_bars = 10 # Conversion du pourcentage en niveau graphique filled = map_value(percent, 0, 100, 0, total_bars * 5) # Positionnement du curseur après le pourcentage lcd.move_to(5, 1) # Affichage des barres graphiques for i in range(total_bars): # Calcul du niveau de remplissage de chaque barre bar_level = filled - (i * 5) # Barre totalement remplie if bar_level >= 5: lcd.putchar(chr(5)) # Barre partiellement remplie elif bar_level > 0: lcd.putchar(chr(bar_level)) # Barre vide else: lcd.putchar(chr(0)) # Petite pause avant la prochaine mesure sleep(0.5) |
Explication du programme :
Au démarrage, le programme initialise la communication I2C afin de connecter l’écran LCD à la carte ESP826 NodeMCU. Ensuite, il configure les broches du capteur HC-SR04 la broche TRIG pour envoyer les ultrasons etla broche ECHO pour recevoir les ultrasons réfléchis par la surface de l’eau.
Le programme crée également plusieurs caractères personnalisés sur l’écran LCD afin d’afficher une barre de progression représentant visuellement le niveau d’eau.
Dans la boucle principale, le capteur ultrasonique envoie des ondes ultrasonores vers l’eau. Lorsque les ultrasons rencontrent la surface de l’eau, ils sont réfléchis puis reviennent vers le capteur. Le programme mesure alors le temps de retour des ultrasons pour calculer la distance entre le capteur et l’eau.
À partir de cette distance, le programme calcule automatiquement le niveau d’eau ainsi que son pourcentage de remplissage.
Ensuite, le pourcentage du niveau d’eau est affiché sur l’écran LCD sous forme des barres de progression dynamique qui montrent visuellement le niveau d’eau dans le récipient.
Enfin, le système répète continuellement les mesures toutes les 0,5 seconde afin d’assurer une surveillance du niveau d’eau en temps réel.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






