Projet de mesure du niveau d’eau avec Micro:bit et capteur HC-SR04
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte Micro:bit
Présentation du projet
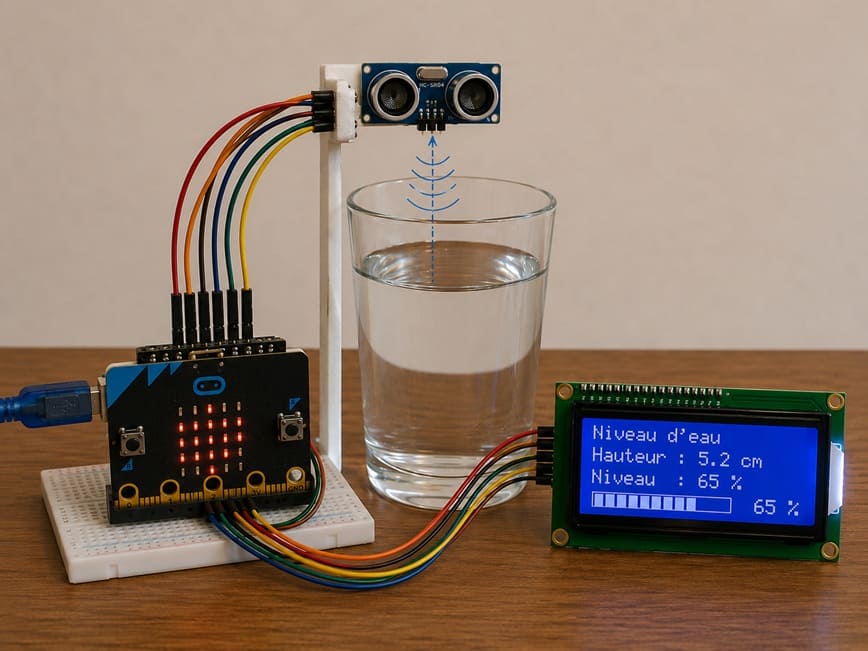
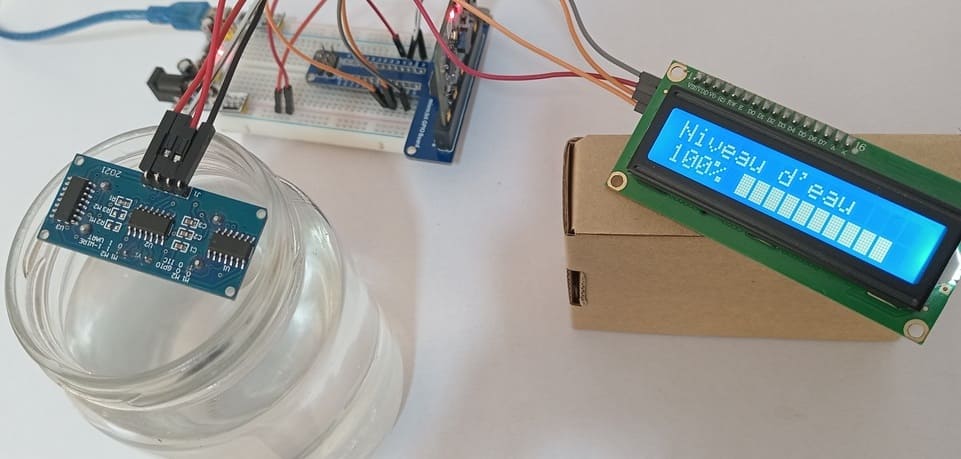
L’objectif de ce projet est de réaliser un système intelligent capable de mesurer et d’afficher le niveau d’eau dans un verre en utilisant la carte Micro:bit, le capteur ultrason HC-SR04 et un afficheur LCD I2C.
Ce système permet de surveiller le niveau d’eau en temps réel grâce à la mesure de la distance entre le capteur et la surface de l’eau. Les résultats sont ensuite affichés sur l’écran LCD sous forme de valeurs ou de barres graphiques afin de faciliter la lecture du niveau d’eau.
Fonctionnement du projet
Lorsque de l’eau est versée dans un verre, le capteur ultrason HC-SR04 mesure la distance entre le capteur et la surface de l’eau à l’aide des ultrasons.
La carte Micro:bit traite les données mesurées puis calcule le niveau d’eau correspondant. Ensuite, les résultats sont affichés sur l’écran LCD I2C sous forme numérique ou graphique pour assurer une surveillance en temps réel.
Lorsque le niveau d’eau augmente, le nombre de barres affichées sur l’écran LCD augmente également. Inversement, lorsque le niveau d’eau diminue, le nombre de barres affichées diminue aussi.
Ce projet peut être utilisé pour découvrir les principes de la mesure ultrasonique, de l’affichage LCD et de la programmation des systèmes embarqués avec la carte Micro:bit.
Matériel nécessaire
1- Carte Micro:bit
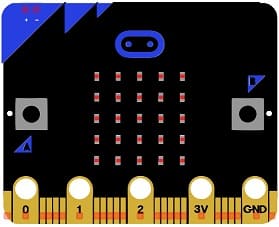
La carte Micro:bit est une carte électronique programmable utilisée pour réaliser des projets éducatifs et interactifs. Elle permet de traiter les données provenant du capteur ultrason et de contrôler l’affichage des résultats sur l’écran LCD I2C.
2- Carte d'Extension GPIO pour Micro:bit

La carte d’extension facilite la connexion des différents composants électroniques à la carte Micro:bit. Elle permet d’accéder facilement aux broches d’entrée et de sortie, d’alimenter les modules électroniques et de simplifier le câblage du projet.
3. Capteur ultrasonique HC-SR04

Le capteur HC-SR04 sert à mesurer la distance entre le capteur et la surface de l’eau. Il fonctionne en envoyant des ultrasons puis en recevant leur écho après réflexion sur l’eau. La distance mesurée permet ensuite de déterminer le niveau d’eau dans le récipient.
4. Afficheur LCD I2C
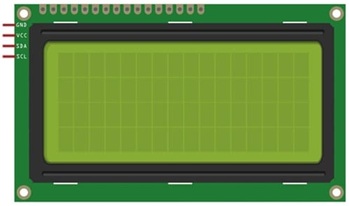
L’afficheur LCD I2C permet d’afficher les informations du projet de manière claire et instantanée. Dans ce système, il affiche le niveau d’eau détecté par le capteur HC-SR04 sous forme de barres graphiques qui augmentent ou diminuent selon la quantité d’eau présente dans le verre.
5. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
6. Plaque d'essai
La plaque d’essai (breadboard) permet de réaliser des montages électroniques sans soudure.
Schéma de câblage du système du système
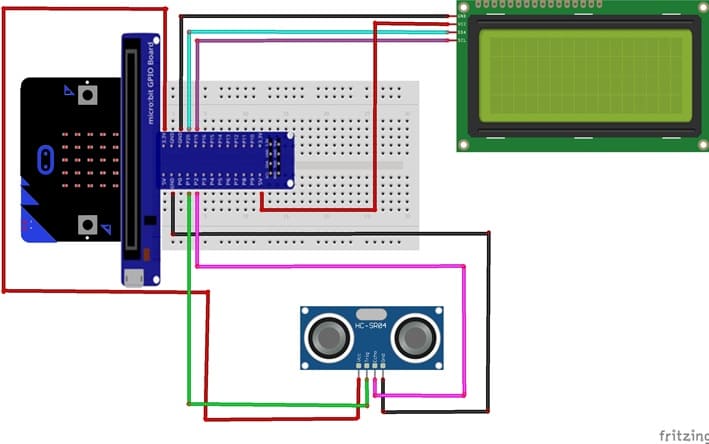
1- Connexion du capteur HC-SR04 à la carte Micro:bit
| Capteur HC-SR04 | Carte Micro:bit |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | P1 |
| Echo | P2 |
2- Connexion de l’afficheur LCD I2C à la carte Microbit
| Afficheur LCD I2C | Carte ESP32 |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | P20 |
| SCL | P19 |
Programmation de la carte Micro:bit
Ce programme permet de réaliser un système intelligent de mesure et d’affichage du niveau d’eau à l’aide de la carte Micro:bit, du capteur Capteur HC-SR04 et d’un Afficheur LCD I2C.
Le programme mesure en temps réel la distance entre le capteur ultrason et la surface de l’eau dans un verre. Ensuite, la carte Micro:bit traite les données reçues afin de calculer le niveau d’eau sous forme de pourcentage.
Les résultats sont affichés sur l’écran LCD I2C sous forme numérique ainsi que sous forme de barres graphiques permettant de visualiser facilement le niveau d’eau.
Lorsque le niveau d’eau augmente, le pourcentage et le nombre de barres affichées augmentent également. Inversement, lorsque le niveau d’eau diminue, les barres graphiques diminuent aussi.
Voici le code en Micropython qui implémente le fonctionnement du système :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 |
# Importation des bibliothèques nécessaires from microbit import * import utime # Adresse I2C de l'afficheur LCD LCD_ADDR = 0x27 # ================================================== # FONCTIONS DE GESTION DE L'AFFICHEUR LCD I2C # ================================================== # Fonction d'envoi de données ou commandes au LCD def lcd_write(cmd, mode=0): # Partie haute de l’octet high = mode | (cmd & 0xF0) | 0x08 # Partie basse de l’octet low = mode | ((cmd << 4) & 0xF0) | 0x08 # Envoi des données avec impulsion Enable i2c.write(LCD_ADDR, bytes([high | 0x04])) i2c.write(LCD_ADDR, bytes([high & ~0x04])) i2c.write(LCD_ADDR, bytes([low | 0x04])) i2c.write(LCD_ADDR, bytes([low & ~0x04])) # Fonction d’envoi d’une commande au LCD def lcd_cmd(cmd): lcd_write(cmd, 0) # Fonction d’envoi d’un caractère au LCD def lcd_data(data): lcd_write(data, 1) # Fonction d’initialisation du LCD def lcd_init(): # Petite temporisation au démarrage sleep(50) # Séquence d'initialisation LCD 4 bits lcd_cmd(0x33) lcd_cmd(0x32) # Mode 4 bits, 2 lignes lcd_cmd(0x28) # Affichage activé lcd_cmd(0x0C) # Déplacement automatique du curseur lcd_cmd(0x06) # Effacement de l’écran lcd_cmd(0x01) sleep(5) # Fonction d’effacement de l’écran LCD def lcd_clear(): lcd_cmd(0x01) sleep(5) # Fonction d’affichage d’un texte def lcd_putstr(text): for c in text: lcd_data(ord(c)) # Fonction de positionnement du curseur def lcd_goto(col, row): # Calcul de l’adresse mémoire du curseur addr = col + (0x40 * row) # Envoi de la position au LCD lcd_cmd(0x80 | addr) # ================================================== # CRÉATION DES CARACTÈRES PERSONNALISÉS # BARRES GRAPHIQUES (0 → 5 niveaux) # ================================================== # Définition des motifs graphiques bar_chars = [ # Barre vide [0,0,0,0,0,0,0,0], # Niveau 1 [16,16,16,16,16,16,16,16], # Niveau 2 [24,24,24,24,24,24,24,24], # Niveau 3 [28,28,28,28,28,28,28,28], # Niveau 4 [30,30,30,30,30,30,30,30], # Barre pleine [31,31,31,31,31,31,31,31] ] # Fonction de création des caractères personnalisés def lcd_create_char(location, pattern): # Limitation de l’emplacement mémoire location &= 0x7 # Sélection de l’adresse CGRAM lcd_cmd(0x40 | (location << 3)) # Envoi du motif graphique for i in range(8): lcd_data(pattern[i]) # ================================================== # CONFIGURATION DU CAPTEUR HC-SR04 # ================================================== # Broche Trigger connectée à P1 TRIG = pin1 # Broche Echo connectée à P2 ECHO = pin2 # Hauteur maximale du verre d’eau MAX_HEIGHT = 6.5 # Fonction de mesure de distance def measure_distance(): # Mise à zéro du Trigger TRIG.write_digital(0) utime.sleep_us(2) # Envoi d’une impulsion ultrasonique TRIG.write_digital(1) utime.sleep_us(10) TRIG.write_digital(0) # Attente du début de l’écho while ECHO.read_digital() == 0: start = utime.ticks_us() # Attente de la fin de l’écho while ECHO.read_digital() == 1: end = utime.ticks_us() # Calcul de la durée de l’écho duration = utime.ticks_diff(end, start) # Conversion en distance (cm) return (duration * 0.034) / 2 # ================================================== # INITIALISATION # ================================================== # Initialisation du LCD lcd_init() # Chargement des 6 caractères personnalisés for i in range(6): lcd_create_char(i, bar_chars[i]) # Affichage du titre sur la première ligne lcd_goto(0, 0) lcd_putstr("Water level") # ================================================== # FONCTION MAP # ================================================== # Fonction de conversion d’une valeur def map_value(x, in_min, in_max, out_min, out_max): return int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min) # ================================================== # BOUCLE PRINCIPALE # ================================================== while True: # Mesure de la distance entre le capteur # et la surface de l’eau distance = measure_distance() # Calcul du niveau d’eau water_level = MAX_HEIGHT - (distance - 2.3) # Limitation du niveau minimum if water_level < 0: water_level = 0 # Limitation du niveau maximum if water_level > MAX_HEIGHT: water_level = MAX_HEIGHT # Conversion du niveau d’eau en pourcentage percent = int((water_level / MAX_HEIGHT) * 100) # ================================================== # AFFICHAGE DU POURCENTAGE # ================================================== lcd_goto(0, 1) # Affichage du pourcentage du niveau d’eau lcd_putstr(str(percent) + "% ") # ================================================== # AFFICHAGE DE LA BARRE GRAPHIQUE # ================================================== # Nombre total de barres total_bars = 10 # Calcul du niveau graphique total filled = map_value(percent, 0, 100, 0, total_bars * 5) # Positionnement du curseur lcd_goto(5, 1) # Affichage des barres graphiques for i in range(total_bars): # Niveau de remplissage de chaque barre level = filled - (i * 5) # Barre complètement remplie if level >= 5: lcd_data(5) # Barre partiellement remplie elif level > 0: lcd_data(level) # Barre vide else: lcd_data(0) # Actualisation toutes les 500 ms sleep(500) |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





