Poubelle intelligente commandée par la carte Micro:bit

Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte Micro:bit
Présentation du projet
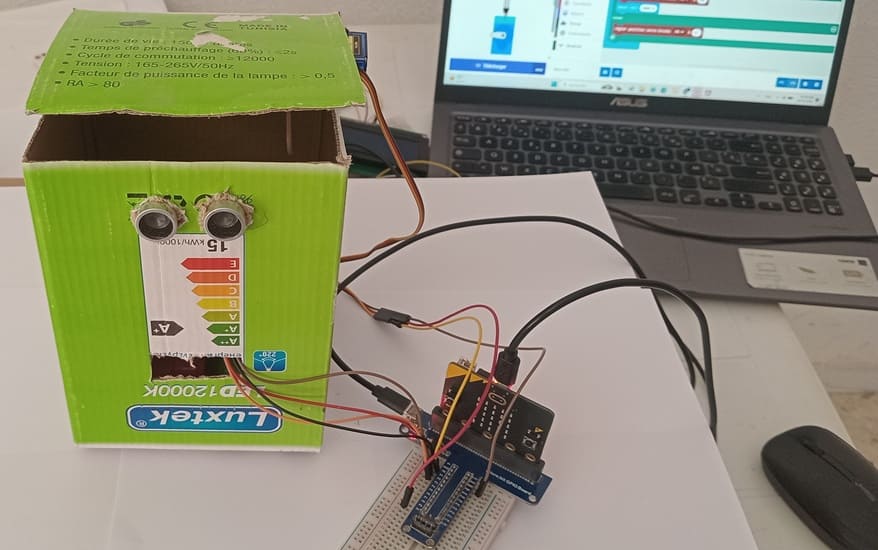
Le projet de poubelle intelligente commandée par la carte BBC micro:bit avec capteur HC-SR04 Ultrasonic Sensor et servomoteur TowerPro SG90 a pour objectif de réaliser une poubelle automatique capable de s’ouvrir sans contact manuel.
Ce système permet :
- d’améliorer l’hygiène en évitant de toucher le couvercle ;
- d’automatiser l’ouverture et la fermeture de la poubelle ;
- de découvrir l’utilisation des capteurs et des servomoteurs dans les projets robotiques ;
- d’apprendre la programmation de la carte Micro:bit.
Fonctionnement du projet
Lorsqu’une personne approche sa main devant la poubelle, le capteur ultrasonique HC-SR04 détecte la présence d’un obstacle en mesurant la distance.
La carte BBC Micro:bit analyse ensuite cette distance.
Si un objet est détecté à une courte distance, la carte envoie un signal au servomoteur SG90 qui ouvre automatiquement le couvercle de la poubelle. Après quelques secondes, le servomoteur remet le couvercle en position fermée.
Ainsi, la poubelle fonctionne de manière automatique et intelligente sans nécessiter de contact physique.
Matériel nécessaire
1- Carte Micro:bit
La carte Micro:bit est une carte électronique programmable utilisée pour réaliser des projets robotiques et électroniques. Elle permet de contrôler les différents composants du projet, comme le capteur ultrasonique et le servomoteur.
2- Carte d'Extension GPIO pour Micro:bit

La carte d’extension facilite la connexion des différents composants électroniques à la carte Micro:bit. Elle permet d’accéder facilement aux broches d’entrée et de sortie, d’alimenter les modules électroniques et de simplifier le câblage du projet.
3. Capteur ultrasonique HC-SR04

Le capteur HC-SR04 est un capteur à ultrasons utilisé pour mesurer la distance entre le capteur et un objet. Il fonctionne en envoyant des ondes ultrasoniques puis en calculant le temps nécessaire pour recevoir l’écho réfléchi par l’objet détecté.
Dans ce projet, il sert à détecter la présence de la main devant la poubelle afin de déclencher l’ouverture automatique du couvercle.
4. Servomoteur

Le servomoteur SG90 est un petit moteur capable de tourner avec précision selon un angle déterminé. Il reçoit des commandes de la carte Micro:bit pour effectuer un mouvement de rotation.
Dans ce projet, il est utilisé pour ouvrir et fermer automatiquement le couvercle de la poubelle.
5. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
6. Plaque d'essai
La plaque d’essai (breadboard) permet de réaliser des montages électroniques sans soudure.
Schéma de câblage du système du système
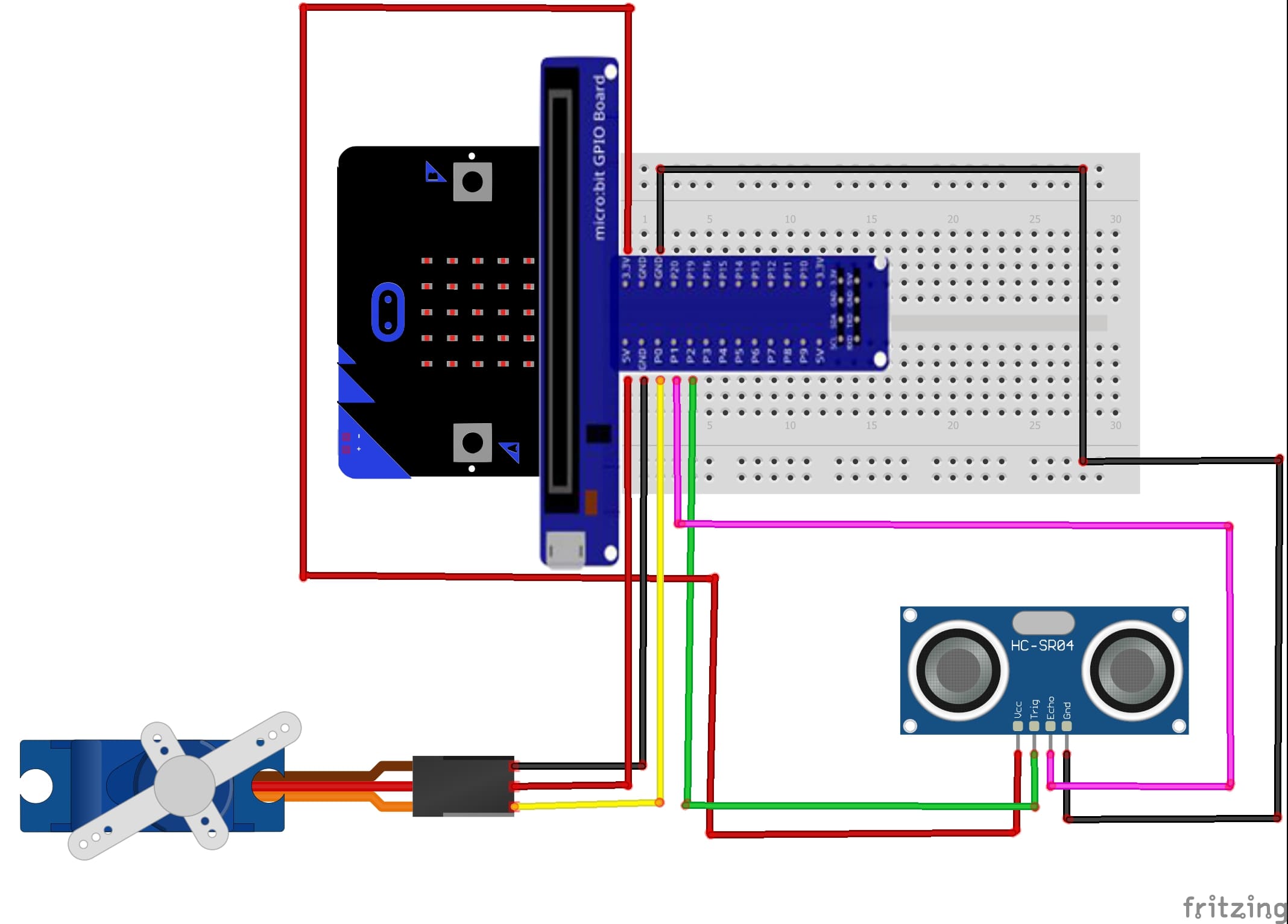
1- Connexion du capteur HC-SR04 à la carte Micro:bit
| Capteur HC-SR04 | Carte Micro:bit |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | P2 |
| Echo | P1 |
2- Connexion du servomoteur à la carte Microbit
| Servomoteur | Carte Micro:bit |
|---|---|
| Fil rouge (+) | 5V |
| Fil marron (-) | GND |
| Fil jaune (S) | P0 |
Programmation de la carte Micro:bit
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
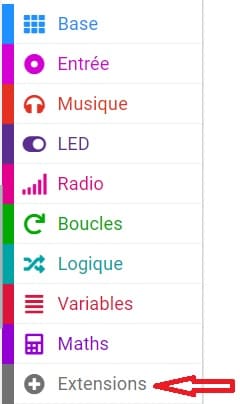
3- Cliquez sur "Extensions" dans le coin inférieur gauche.
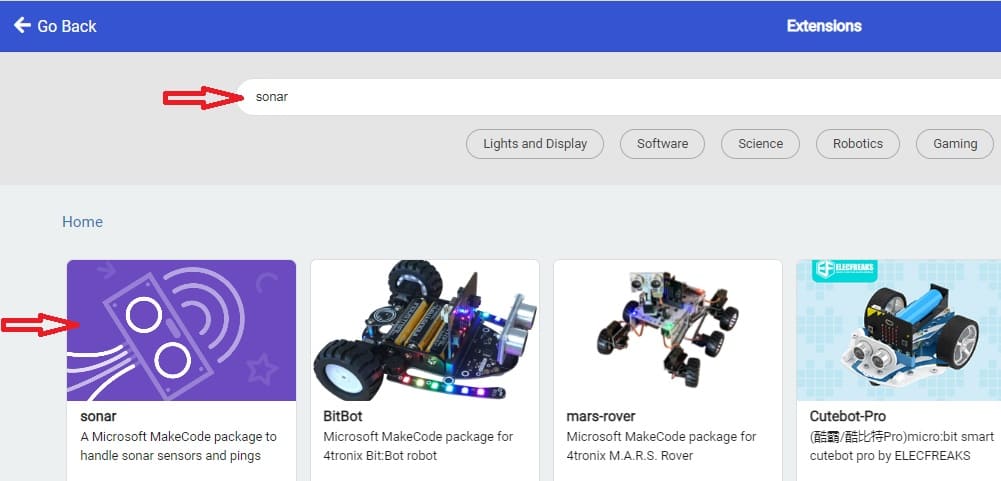
4- Rechercher et ajouter l'extension "sonar"
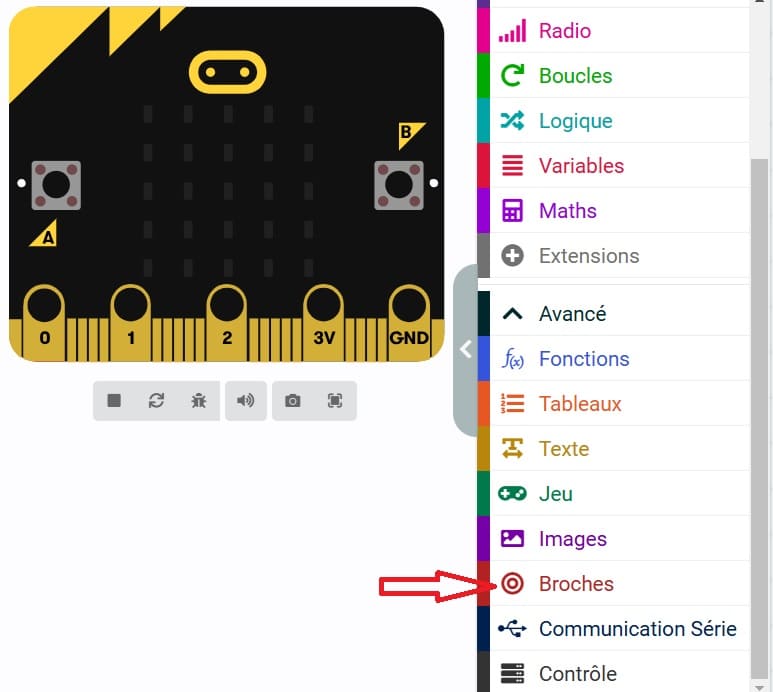
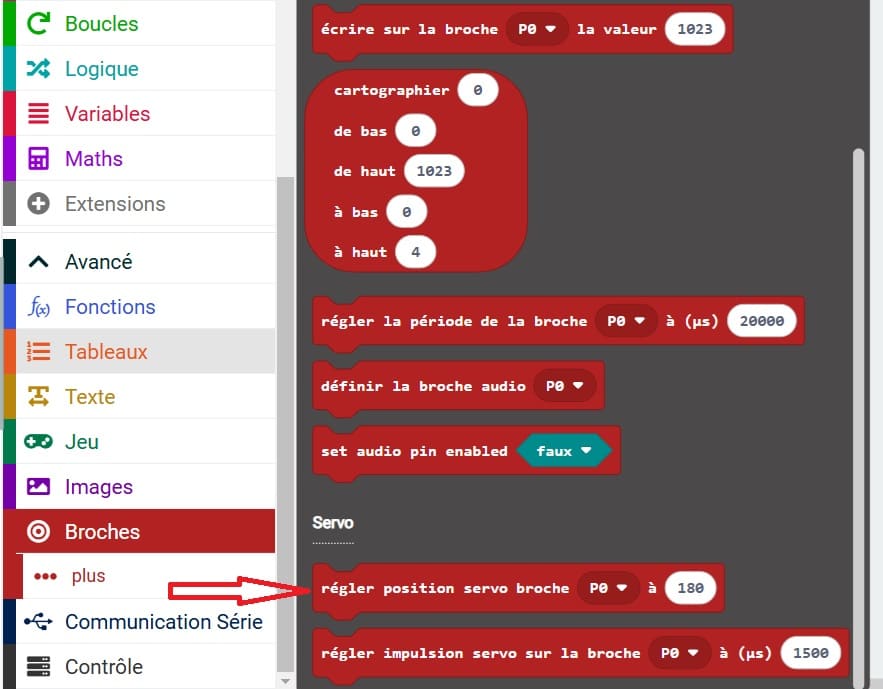
5- Cliquez sur "Broches"
6- Choisir l'instruction régler position servo broche P0 à 180 pour commander le servomoteur :
Voici le programme MakeCode pour Micro:bit sert à contrôler un servomoteur (porte/couvercle) à l’aide de boutons et d’un capteur à ultrasons (type HC-SR04) pour détecter la proximité d’un objet.
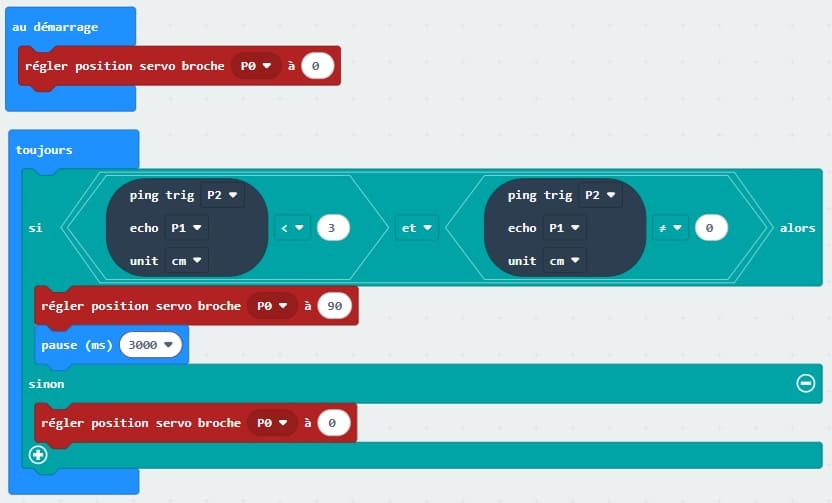
Explication du programme :
Position initiale

Le servomoteur est fermé (0°) au démarrage
Boucle infinie

Le programme vérifie en continu la distance
Détection d’un objet
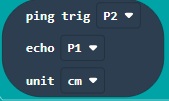
Mesure la distance en cm avec le capteur ultrason
Condition d’ouverture

Si un objet est à moins de 3 cm (et mesure valide) :
Le servo s’ouvre à 90° et reste ouvert pendant 3 secondes

Sinon (aucun objet proche)
![]()
Le servo reste ou revient à 0° (fermé)
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente