Robinet d’eau automatique piloté par Micro:bit
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte Micro:bit
Présentation du projet
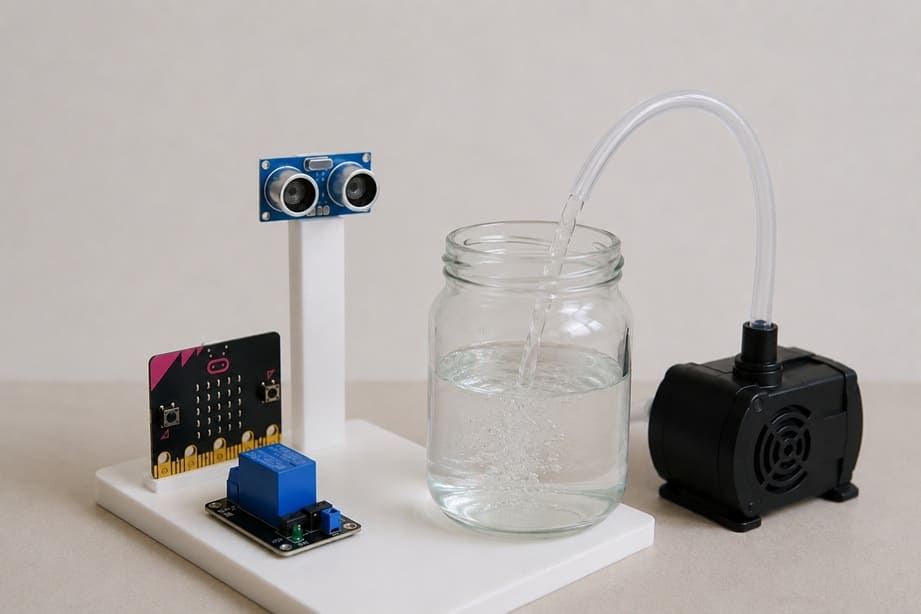
Le projet de robinet d’eau automatique piloté par la carte Micro:bit a pour objectif de créer un système intelligent permettant de distribuer de l’eau sans contact manuel. Ce type de dispositif vise principalement à améliorer l’hygiène, à réduire le gaspillage d’eau et à faciliter l’utilisation dans des environnements comme les écoles, les cuisines ou les laboratoires.
Le fonctionnement du système repose sur plusieurs composants électroniques et mécaniques. Le capteur ultrason HC-SR04 détecte la présence d’une main ou d’un récipient sous le robinet en mesurant la distance. Lorsque cette distance devient faible, cela signifie qu’un objet est placé sous le robinet.
Une fois la présence détectée, la Micro:bit traite l’information et envoie un signal au module relais. Ce relais agit comme un interrupteur électronique qui permet de contrôler l’alimentation de la pompe à eau 12 V (noire). Lorsque le relais est activé, la pompe se met en marche et aspire l’eau depuis le bocal en verre.
L’eau est ensuite acheminée à travers un tuyau et s’écoule automatiquement comme un robinet classique. Dès que l’objet ou la main s’éloigne, le capteur ne détecte plus de présence, la Micro:bit coupe le signal et le relais désactive la pompe, arrêtant ainsi l’écoulement de l’eau.
Matériel nécessaire
1- Carte Micro:bit
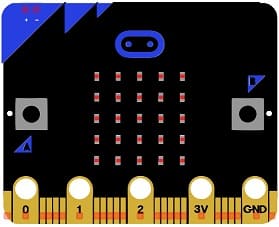
La carte Micro:bit constitue l'unité de commande du système. Elle exécute le programme qui analyse les données du capteur à ultrasons et contrôle automatiquement l'activation ou l'arrêt de la pompe à eau via le module relais.
2- Carte d'Extension GPIO pour Micro:bit

La carte d’extension facilite la connexion des différents composants électroniques à la carte Micro:bit. Elle permet d’accéder facilement aux broches d’entrée et de sortie, d’alimenter les modules électroniques et de simplifier le câblage du projet.
3. Capteur ultrasonique HC-SR04

Le HC-SR04 est utilisé pour détecter la présence d'une main ou d'un récipient placé sous le robinet. Il mesure la distance grâce à des ondes ultrasoniques et envoie cette information à la carte Micro:bit pour déclencher la distribution d'eau lorsque l'objet est suffisamment proche.
4. Module relais

Le module relais agit comme un interrupteur électronique commandé par la carte Micro:bit. Il permet de commuter une alimentation de 12 V en toute sécurité afin d'alimenter ou de couper la pompe à eau, tout en isolant le circuit de commande du circuit de puissance.
5. Pompe à eau de 12 V

Le module relais agit comme un interrupteur électronique commandé par la carte Micro:bit. Il permet de commuter une alimentation de 12 V en toute sécurité afin d'alimenter ou de couper la pompe à eau, tout en isolant le circuit de commande du circuit de puissance.
6. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
7. Plaque d'essai
La plaque d’essai (breadboard) permet de réaliser des montages électroniques sans soudure.
Schéma de câblage du système du système
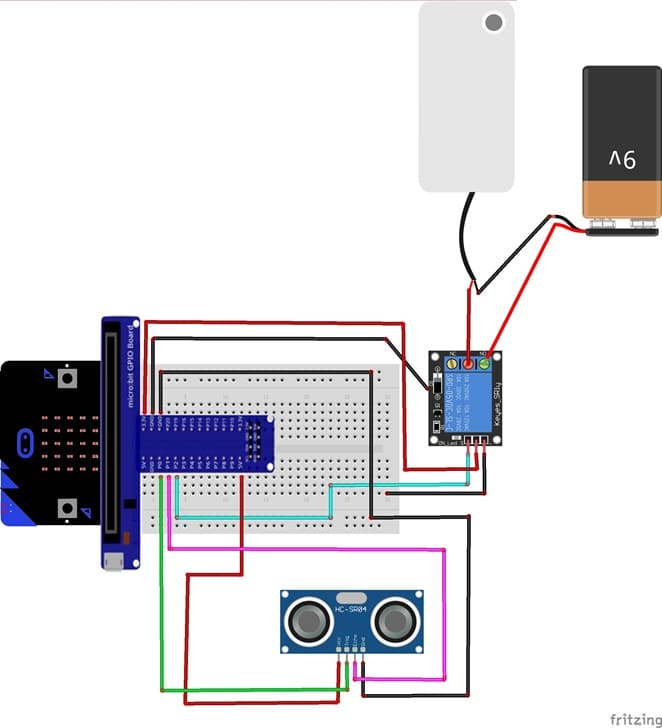

1- Connexion du capteur HC-SR04 à la carte Micro:bit
| Capteur HC-SR04 | Carte Micro:bit |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | P0 |
| Echo | P1 |
2- Connexion du module relais à la carte Microbit
| Module relais | Carte Micro:bit |
|---|---|
| Broche positive (+) | 3V |
| Broche négative (-) | GND |
| Broche (S) | P2 |
3- Connexion de la pompe à eau
| Fil rouge (+) | Broche COM (Module relais) |
| Fil rouge (-) | Borne négative (de deux plies de 3.7V) |
4- Connexion de deux piles de 3.7V au module relais
| deux piles | Module relais |
|---|---|
| Fil rouge (+) | Broche NO |
Programmation de la carte Micro:bit
Suivez ces étapes pour ajouter le code nécessaire :
1- Ouvrez l'éditeur MakeCode pour Micro:bit sur le site https://makecode.microbit.org/.
2- Créez un nouveau projet.
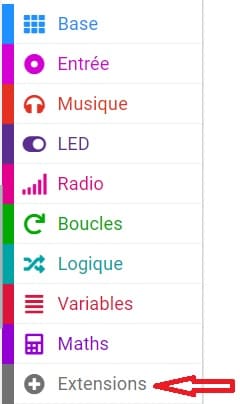
3- Cliquez sur "Extensions" dans le coin inférieur gauche.
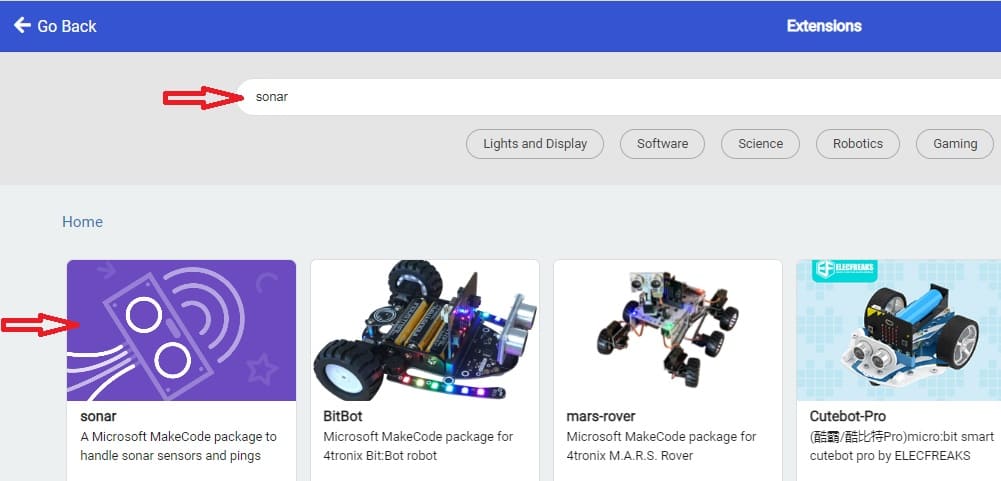
4- Rechercher et ajouter l'extension "sonar"
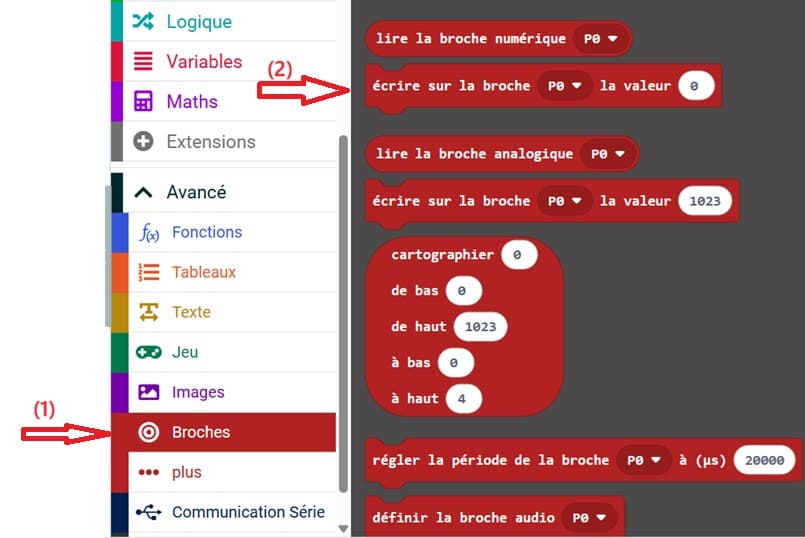
5- Cliquez sur "Broches" et choisir l'instruction "écrire sur la broche P0 la valeur 0" pour commander le relais :
 Voici le programme
Voici le programme
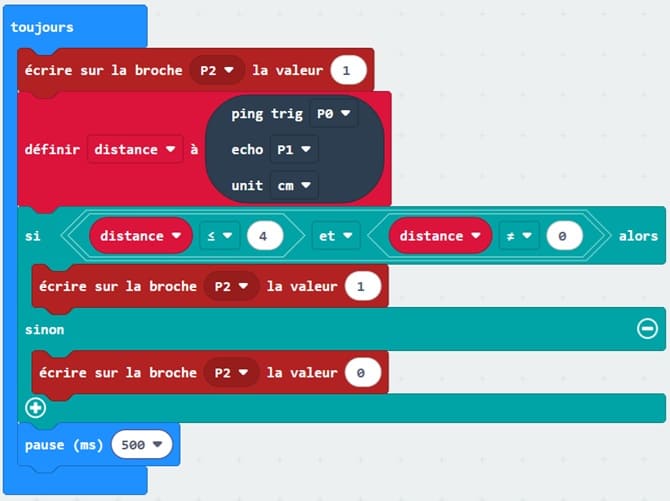
Voici le programme MakeCode permet de contrôler automatiquement une pompe à eau en fonction de la distance mesurée par un capteur ultrason, dans un système de robinet automatique basé sur la carte Micro:bit.
Explication du programme :
Au début du programme, la variable distance est initialisée à 0. Ensuite, une boucle infinie basic.forever est utilisée pour exécuter le programme en continu. Cela signifie que la Micro:bit va mesurer la distance et contrôler la pompe sans interruption.
Dans chaque cycle, le programme envoie d’abord un signal sur la broche P2, puis il utilise la fonction sonar.ping() pour mesurer la distance entre le capteur ultrason (connecté sur P0 pour l’écho et P1 pour le déclenchement) et un objet placé devant lui. La distance est exprimée en centimètres et stockée dans la variable distance.
Ensuite, une condition est vérifiée : si la distance est inférieure ou égale à 4 cm et différente de 0, cela signifie qu’un objet (comme une main ou un récipient) est très proche du capteur. Dans ce cas, la broche P2 est activée (1), ce qui permet de commander le module relais et donc d’alimenter la pompe à eau.
Sinon, si aucune présence proche n’est détectée, la broche P2 est désactivée (0), ce qui coupe l’alimentation de la pompe et arrête l’écoulement de l’eau.
Enfin, une pause de 500 ms est ajoutée à la fin de chaque boucle pour stabiliser les mesures et éviter que le système ne réagisse trop rapidement aux variations du capteur.
Ainsi, ce programme permet un fonctionnement automatique du robinet : la pompe s’active uniquement lorsqu’un objet est détecté à très courte distance, garantissant un contrôle simple, efficace et sans contact.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente