Allumer deux LEDs connectées à l’Arduino UNO par les boutons poussoirs
Plan du tutoriel
1- Rôle du bouton poussoir dans la robotique
2- Les composants nécessaires pour contrôler deux LEDs par deux boutons poussoirs à travers la carte Arduino UNO
3- Montage de la carte Arduino UNO avec deux LEDs et deux boutons poussoirs
4- Programmation de la carte Arduino UNO pour allumer deux LEDs par deux boutons poussoirs
Rôle du bouton poussoir dans la robotique
Le bouton-poussoir, ou bouton de commande, est un composant couramment utilisé dans la robotique pour diverses fonctions. Son rôle dépend du contexte dans lequel il est intégré et de la manière dont il est programmé. Voici quelques-uns des rôles principaux qu'un bouton-poussoir peut jouer dans la robotique :
Commande de démarrage/arrêt : Un bouton-poussoir peut être utilisé pour démarrer ou arrêter le fonctionnement du robot. C'est une méthode simple et efficace pour activer ou désactiver le robot en toute sécurité.
Sélection de modes : Un robot peut avoir différents modes de fonctionnement (par exemple, mode manuel, mode automatique, mode de maintenance). Un bouton-poussoir peut servir à basculer entre ces modes.
Déclenchement d'actions spécifiques : Dans certaines applications, un bouton-poussoir peut être utilisé pour déclencher des actions spécifiques, telles que la saisie d'un objet, le lancement d'un processus de nettoyage, etc.
Sécurité et arrêt d'urgence : Les boutons-poussoirs d'arrêt d'urgence sont des dispositifs de sécurité cruciaux. Lorsqu'ils sont enfoncés, ils interrompent immédiatement toutes les opérations du robot pour éviter les accidents.
Calibrage et réinitialisation : Les boutons-poussoirs peuvent être utilisés pour des opérations de calibrage ou de réinitialisation du robot, par exemple pour recalibrer les capteurs ou rétablir les paramètres par défaut.
Navigation manuelle : Dans le cas de robots mobiles, un bouton-poussoir peut permettre à un opérateur de prendre le contrôle manuel du robot pour le déplacer ou le guider.
Confirmation d'action : Un bouton-poussoir peut être utilisé pour confirmer une action importante, comme la validation d'un choix ou d'une opération critique.
Les boutons-poussoirs sont généralement associés à des routines de programmation qui déterminent leur comportement, ce qui leur confère une grande polyvalence dans la robotique. Ils peuvent être intégrés dans des panneaux de commande, des consoles d'opérateur ou directement sur le robot lui-même, en fonction des besoins spécifiques de l'application robotique.
Les composants nécessaires pour contrôler deux LEDs par deux boutons poussoirs à travers la carte Arduino UNO
Pour contrôler deux LEDs par deux boutons poussoirs vous aurez besoin des composants suivants :
Arduino UNO :

La carte Arduino UNO est la carte de développement principale utilisée pour programmer et contrôler la LED.
deux LEDs :
Vous aurez besoin d'une LED (Light Emitting Diode) pour afficher la sortie visuelle. Vous pouvez choisir la couleur de votre choix.
bouton-poussoir
Un bouton-poussoir est un composant électromécanique couramment utilisé pour établir ou interrompre un circuit électrique temporairement. Il est composé d'un boîtier, d'un bouton (généralement encastré) et de contacts électriques.
Résistance

La résistance électrique, mesurée en ohms (symbole : Ω), est une propriété fondamentale d'un composant électrique ou d'un matériau qui s'oppose au passage du courant électrique à travers lui. En d'autres termes, la résistance électrique mesure la quantité d'opposition qu'un matériau ou un composant offre au flux de courant électrique.
Breadboard (Plaque d'essai) :

Une breadboard est utile pour créer un circuit temporaire et connecter facilement les composants entre eux.
Fils de connexion :

Des fils de connexion sont nécessaires pour relier les différents composants ensemble.
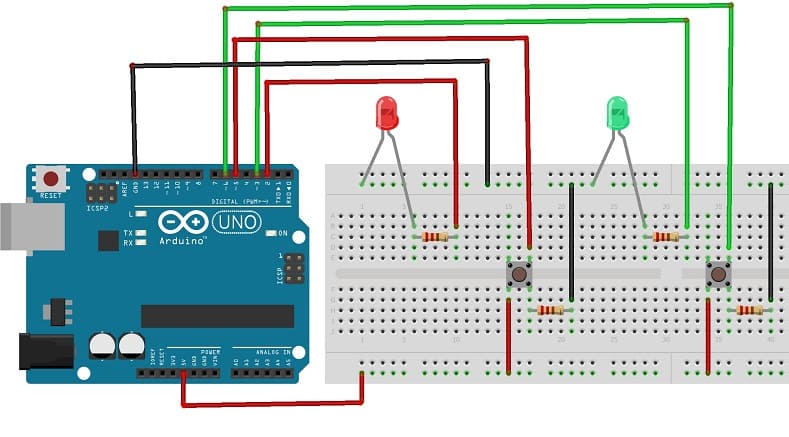
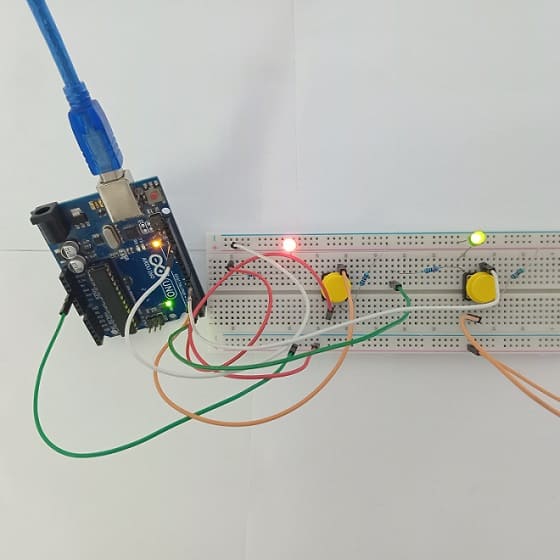
Montage de la carte Arduino UNO avec deux LEDs et deux boutons poussoirs
Voici comment vous pouvez connecter deux LEDs et deux boutons poussoirs à la carte Arduino UNO :
1- Connectez la carte Arduino UNO à votre ordinateur à l'aide du câble USB.
2- Prenez deux LEDs . Utilisez les fils de raccordement pour la connecter à la carte Arduino :
- Insérez les LEDs dans la breadboard.
- Branchez la patte longue (anode) de la LED rouge au pin 2 de l'Arduino via une résistance de 220 ohms.
- Branchez la patte longue (anode) de la LED verte au pin 3 de l'Arduino via une résistance de 220 ohms.
- Connectez la patte courte (cathode) de chaque LED à la masse (GND) de l'Arduino.
3- Prenez deux boutons poussoirs et utilisez les fils de raccordement pour le à la carte Arduino :
- Connectez une patte du premier bouton-poussoir à la broche N°5 de l'Arduino.
- Connectez une autre patte du premier bouton-poussoir à la broche 5V de l'Arduino.
- Placez une résistance de 10k Ohm entre le troisième patte du premier bouton-poussoir et la broche GND
- Connectez une patte du deuxième bouton-poussoir à la broche N°6 de l'Arduino.
- Connectez une autre patte du deuxième bouton-poussoir à la broche 5V de l'Arduino.
- Placez une résistance de 10k Ohm entre le troisième patte du deuxième bouton-poussoir et la broche GND
Programmation de la carte Arduino UNO pour allumer deux LEDs par deux boutons poussoirs
Pour programmer une carte Arduino UNO afin d'allumer deux LEDs à l'aide de deux boutons-poussoirs, Assurez-vous d'avoir installé l'IDE Arduino sur votre ordinateur et connecté votre Arduino UNO.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 |
#define Red_PIN 2 // LED connectée au pin 2 de l'Arduino #define Red_BUTTON_PIN 5 // le bouton poussoir connecté au pin 5 de l'Arduino byte RedlastButtonState = LOW; // variable de lecture de l'état du 1er bouton poussoir byte RedledState = LOW; // variable de lecture de l'état du 1er bouton poussoir byte GreenlastButtonState = LOW; byte GreenledState = LOW; unsigned long debounceDuration = 50; // millis unsigned long lastTimeRedButtonStateChanged = 0; unsigned long lastTimeGreenButtonStateChanged = 0; void setup() { // initialise la broche Red_PIN en sortie pinMode(Red_PIN, OUTPUT); // initialise la broche du bouton-poussoir en entrée pinMode(Red_BUTTON_PIN, INPUT); // initialise la broche Green_PIN en sortie pinMode(Green_PIN, OUTPUT); // initialise la broche du bouton-poussoir en entrée pinMode(Green_BUTTON_PIN, INPUT); } void loop() { // pour allumer ou eteindre la LED rouge par le bouton poussoir //nous ne demarrons la fonctionnalite bouton/LED que si suffisamment de temps s'est écoule //depuis la derniere fois que l'etat du bouton a ete modifie if (millis() - lastTimeRedButtonStateChanged > debounceDuration) { byte RedbuttonState = digitalRead(Red_BUTTON_PIN); // vérifie si le bouton poussoir est enfoncé if (RedbuttonState != RedlastButtonState) { lastTimeRedButtonStateChanged = millis(); RedlastButtonState = RedbuttonState; if (RedbuttonState == LOW) { RedledState = (RedledState == HIGH) ? LOW: HIGH; // Basculer l'etat de LED lorsque le bouton a été relâché digitalWrite(Red_PIN, RedledState); // allumer ou éteindre la LED selon l'etat du LED } } } // pour allumer ou eteindre la LED verte rouge par le deuxième bouton if (millis() - lastTimeGreenButtonStateChanged > debounceDuration) { byte GreenbuttonState = digitalRead(Green_BUTTON_PIN); if (GreenbuttonState != GreenlastButtonState) { lastTimeGreenButtonStateChanged = millis(); GreenlastButtonState = GreenbuttonState; if (GreenbuttonState == LOW) { GreenledState = (GreenledState == HIGH) ? LOW: HIGH; digitalWrite(Green_PIN, GreenledState); } } } } |
Téléversez ce code sur votre Arduino UNO à l'aide de l'IDE Arduino.
Maintenant, lorsque vous appuierez sur le premier bouton-poussoir, la LED rouge s'allumera, et lorsque vous appuierez une deuxième fois sur le bouton-poussoir, la LED rouge s'éteindra.
Et lorsque vous appuierez sur le deuxième bouton-poussoir, la LED verte s'allumera, et lorsque vous appuierez une deuxième fois sur le bouton-poussoir, la LED verte s'éteindra.
2 commentaires

thomas gallions 09-11-2525
les gars y'a une erreur il faut rajouter #define Green_PIN 3 #define Green_BUTTON_PIN 6
Amine 13-10-2424
s'il vous plais je ve le code de ce projet allumé deux leds par deux boutons poussoirs Merci.
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés



Bras robotique

Categories
Maison intelligente

But de ce site web
La robotique éducative joue un rôle important dans l'éducation des enfants et des jeunes en les aidant à acquérir des compétences en science et technologie.
Dans ce cadre notre site web représente une excellente ressource pour les parents, les enseignants et les enfants qui souhaitent découvrir la robotique.
Coordonnées
Zaouiet Kontech-Jemmel-Monastir-Tunisie
Articles populaires
Photos des articles






Site robotique réalisé par Mohamed Ali Haj Salah - Prof Info