Projet Arduino : Construction d’une poubelle intelligente
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte Arduino UNO
Présentation du projet
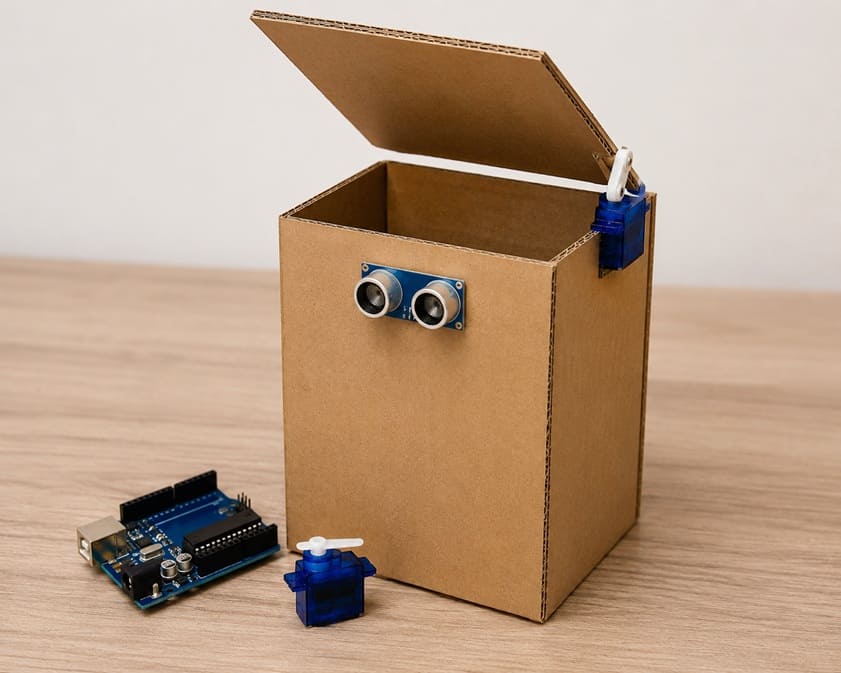
L’objectif de ce projet est de concevoir une poubelle intelligente en carton capable d’ouvrir et de fermer automatiquement son couvercle grâce à une carte Arduino UNO, un capteur à ultrasons HC-SR04 et un servomoteur.
Ce projet permet de découvrir les principes de l’automatisation, de la programmation et de la robotique tout en proposant une solution pratique et hygiénique pour la gestion des déchets.
Fonctionnement du projet
La structure de la poubelle est réalisée en carton, offrant un support léger, économique et facile à fabriquer pour intégrer les différents composants électroniques.
Le capteur à ultrasons HC-SR04 est fixé sur la partie supérieure de la poubelle afin de détecter la présence d’une main ou d’un objet à proximité.
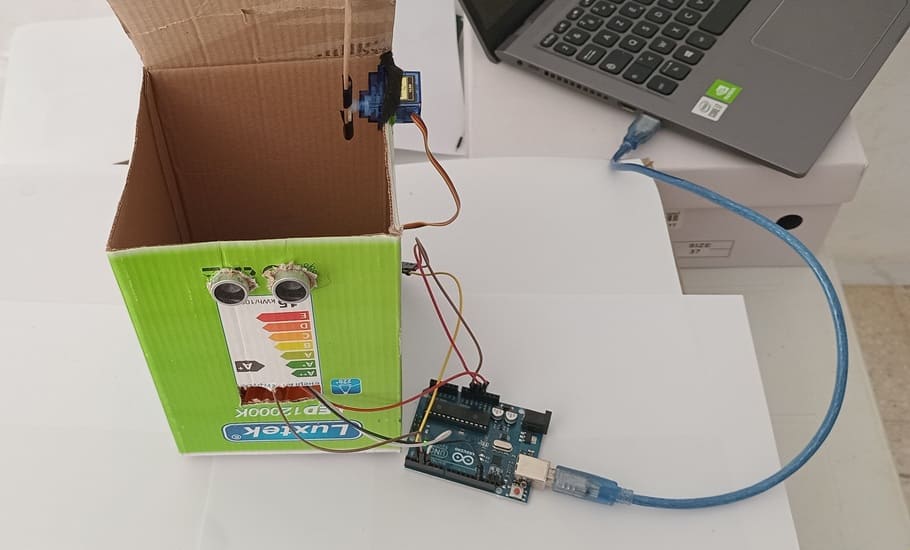
Lorsque le capteur détecte un objet à une distance déterminée, il envoie les informations mesurées à la carte Arduino UNO. Celle-ci traite les données reçues et commande le servomoteur pour ouvrir automatiquement le couvercle de la poubelle.
Après un court délai permettant à l’utilisateur de déposer ses déchets, la carte Arduino ordonne au servomoteur de refermer le couvercle. La poubelle fonctionne ainsi de manière autonome, sans contact physique, ce qui améliore l’hygiène et le confort d’utilisation.
Ce projet constitue une excellente initiation à la programmation des systèmes embarqués et à la réalisation de dispositifs intelligents destinés à faciliter les tâches quotidiennes.
Matériel nécessaire
1- Arduino UNO

La carte Arduino UNO est le cerveau du système. Elle exécute le programme chargé par l’utilisateur, reçoit les informations du capteur HC-SR04 et commande le servomoteur pour ouvrir ou fermer le couvercle de la poubelle.
2. Capteur ultrasonique HC-SR04

Le capteur HC-SR04 permet de mesurer la distance entre la poubelle et un objet situé devant elle. Il émet des ondes ultrasonores et calcule le temps nécessaire à leur retour après réflexion sur un obstacle. Cette distance est ensuite transmise à la carte Arduino UNO.
3. Servomoteur

Le servomoteur SG90 est un petit moteur capable de tourner avec précision selon un angle déterminé. Il reçoit des commandes de la carte Micro:bit pour effectuer un mouvement de rotation.
Dans ce projet, il est utilisé pour ouvrir et fermer automatiquement le couvercle de la poubelle.
4. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
5. Plaque d'essai
La plaque d’essai (breadboard) permet de réaliser des montages électroniques sans soudure.
Schéma de câblage du système du système
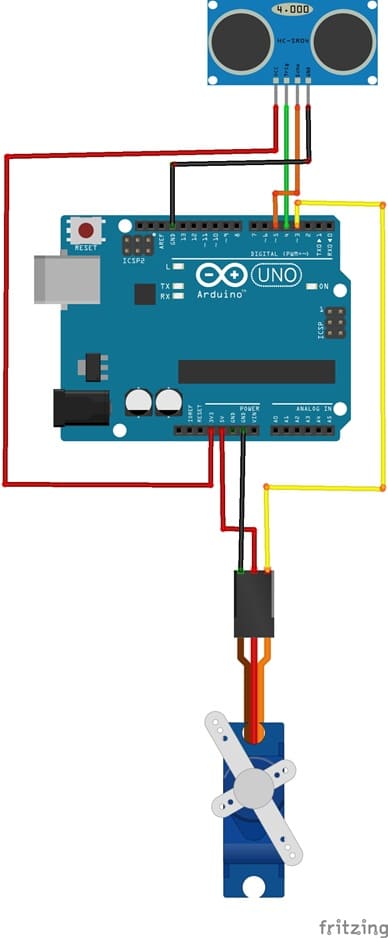
1- Connexion du capteur HC-SR04 à la carte Arduino UNO
| Capteur HC-SR04 | Arduino UNO |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | D4 |
| Echo | D3 |
2- Connexion du servomoteur à la carte Arduino UNO
| Servomoteur | Arduino UNO |
|---|---|
| Fil rouge (+) | 5V |
| Fil marron (-) | GND |
| Fil jaune (S) | D2 |
Programmation de la carte Arduino UNO
Ce programme Arduino réalise un système d’ouverture automatique de couvercle à l’aide d’un capteur à ultrasons HC-SR04 et d’un servomoteur.
Vous devez importer cette bibliothèque Ultrasonic pour utiliser la capteur HC-SR04.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 |
// ====================================================== // Importation des bibliothèques nécessaires // ====================================================== #include "Ultrasonic.h" // Bibliothèque pour le capteur HC-SR04 #include <Servo.h> // Bibliothèque pour le servomoteur // ====================================================== // Déclaration et initialisation des composants // ====================================================== // Création de l'objet capteur à ultrasons // Broche Trig connectée à D4 et Echo à D3 Ultrasonic ultrasonic(4, 3); // Création de l'objet servomoteur Servo myservo; // Variable de position du servomoteur int pos = 0; // ====================================================== // Fonction d'initialisation // ====================================================== void setup() { // Initialisation de la communication série // pour afficher les mesures sur le moniteur série Serial.begin(9600); // Connexion du servomoteur à la broche D2 myservo.attach(2); // Fermeture initiale du couvercle (0°) myservo.write(0); } // ====================================================== // Boucle principale // ====================================================== void loop() { // Mesure de la distance en centimètres int distance = ultrasonic.Ranging(CM); // Affichage de la distance mesurée Serial.print("distance = "); Serial.print(distance); Serial.println(" cm"); // Si un objet est détecté à moins de 3 cm if (distance < 3) { // Ouvrir le couvercle (rotation du servo à 90°) myservo.write(90); // Attendre 3 secondes delay(3000); } else { // Aucun objet proche : // fermer le couvercle (retour à 0°) myservo.write(0); } // Petite pause avant la prochaine mesure delay(300); } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





