Remplissage automatique des bouteilles en utilisant Arduino et KY-032
Plan du tutoriel
1- Présentation des systèmes de remplissage automatique des bouteilles
2- Comment Arduino UNO contrôle le remplissage automatique des bouteille ?
3- Matériel requis du système
4- Schéma de câblage du système
5- Programmation de la carte Arduino
Présentation des systèmes de remplissage automatique des bouteilles
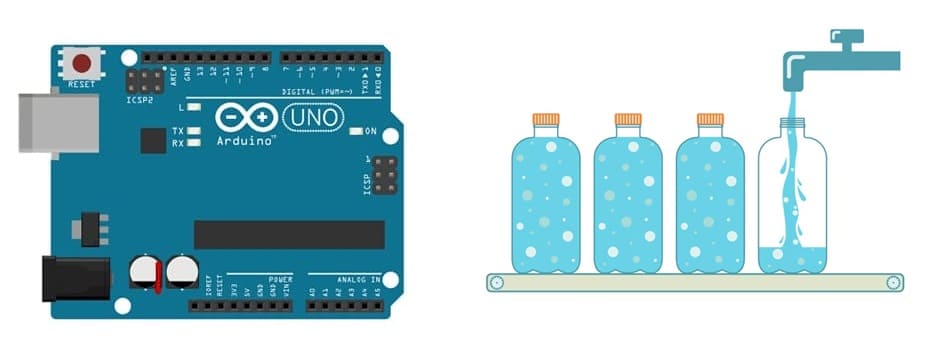
Les systèmes de remplissage automatique des bouteilles sont des équipements industriels conçus pour remplir rapidement et efficacement des bouteilles avec des liquides ou d'autres substances, selon des volumes précis. Ces systèmes sont largement utilisés dans des industries comme l’agroalimentaire, la cosmétique, la pharmacie et la chimie. Voici une présentation des principaux aspects de ces systèmes.
Fonctionnement général
Le processus de remplissage automatique repose sur plusieurs étapes :
1- Positionnement des bouteilles : Les bouteilles sont acheminées sur un convoyeur vers la station de remplissage.
2- Dosage du liquide : Le liquide est mesuré pour correspondre au volume requis.
3- Remplissage : Le liquide est introduit dans la bouteille par un mécanisme automatisé.
4- Fermeture (si applicable) : Une fois remplie, la bouteille est souvent bouchée automatiquement.
Avantages des systèmes de remplissage automatique
Efficacité accrue : Remplissage rapide avec un minimum d’intervention humaine.
Précision : Réduction des pertes grâce à un contrôle rigoureux des volumes.
Adaptabilité : Capacité à traiter différents types de bouteilles et de liquides.
Hygiène : Essentiel dans les industries sensibles comme l’agroalimentaire et la pharmacie.
Réduction des coûts : Moins de main-d'œuvre nécessaire et productivité augmentée.
Comment Arduino UNO contrôle le remplissage automatique des bouteille ?
Pour réaliser un système de remplissage automatique des bouteilles avec un Arduino UNO, un capteur KY-032 (capteur infrarouge anti-collision), un moteur pas à pas US-17H4401, et une pompe à eau, voici les étapes principales du processus, les connexions et le code de base nécessaire :
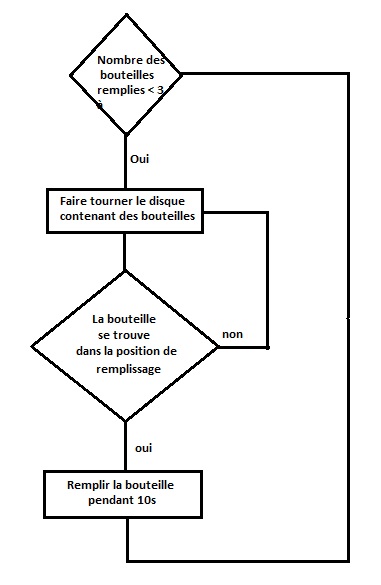
Fonctionnement du système
1-Initialisation :
L’Arduino initialise tous les composants (moteur, capteur et pompe). Le disque est positionné pour placer la première bouteille sous la pompe.
2- Détection d’une bouteille :
Le capteur KY-032 détecte si une bouteille est présente dans une position spécifique.
3- Remplissage de la bouteille :
Lorsque le capteur détecte une bouteille, la pompe s’active pendant une durée prédéfinie pour la remplir.
4- Rotation du disque :
Après le remplissage, le moteur pas à pas fait tourner le disque (via la chaîne de distribution) pour amener la bouteille suivante sous la pompe.
5- Cycle répété :
Le processus se répète jusqu’à ce que toutes les bouteilles soient remplies ou qu’une commande d’arrêt soit reçue.
Matériel requis du système
Arduino UNO

L'Arduino UNO est une carte microcontrôleur basée sur l'ATmega328P. Elle permet de :
1- Centraliser les données du capteur KY-032.
2- Contrôler le moteur pas à pas et la pompe à eau.
3- Exécuter le programme pour gérer le flux de travail.
Capteur infrarouge KY-032

Le KY-032 est un capteur infrarouge anti-collision.
Il détecter l’arrivée d’une bouteille sur le convoyeur et Envoie un signal à l'Arduino pour arrêter le convoyeur et activer la pompe.
Moteur pas à pas US-17H4401

Le US-17H4401 est un moteur pas à pas bipolaire.
Il déplace les bouteilles sur le convoyeur et permet un alignement précis sous la pompe à eau.
Pompe à eau de 12 V

Une petite pompe à eau électrique utilisée pour pomper des liquides.
Il remplit les bouteilles avec une quantité précise d'eau et il fonctionne lorsque l'Arduino active le relais.
Module relais

Un relais est un interrupteur électronique.
Il active ou désactive la pompe à eau en fonction des commandes de l'Arduino.
Carte CNC
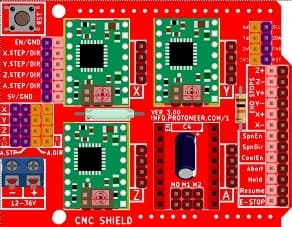
Pour contrôler un moteur pas à pas comme le US-17H4401 dans un système basé sur Arduino, une carte CNC Shield est une solution pratique et efficace. Ces cartes sont conçues pour gérer plusieurs moteurs pas à pas via des drivers compatibles comme l'A4988 ou le DRV8825.
Tige support

Le tige de support est un élément mécanique utilisé pour maintenir une bouteille en place pendant le processus de remplissage des bouteilles.
Disque

Il sert de plateau pour positionner les bouteilles sous la sortie de la pompe.
Courroie de distribution

Il relie le moteur pas à pas au disque pour transmettre le mouvement.
Batterie de 9V

On utilise cette batterie pour alimenter la pompe à eau.
Fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement Arduino.
Schéma de câblage du système
1- Montage de la carte Arduino et le capteur capteur infrarouge KY-032
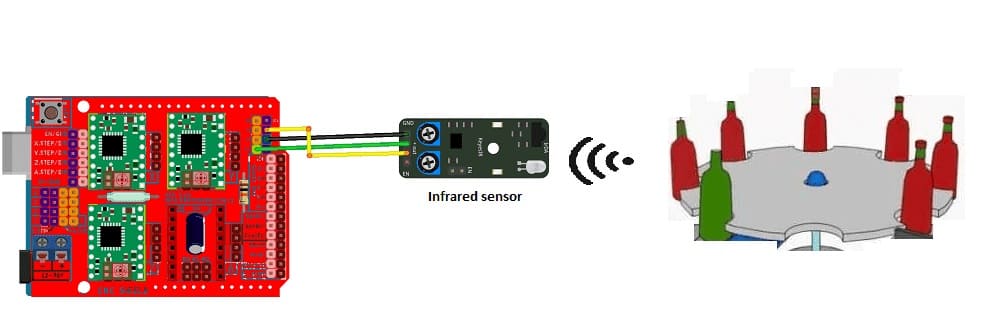
KY-032 (capteur infrarouge) :
VCC → 5V (Arduino)
GND → GND (Arduino)
OUT → Pin analogique A4 (SDA)
2- Montage de la carte Arduino avec le moteur pas à pas
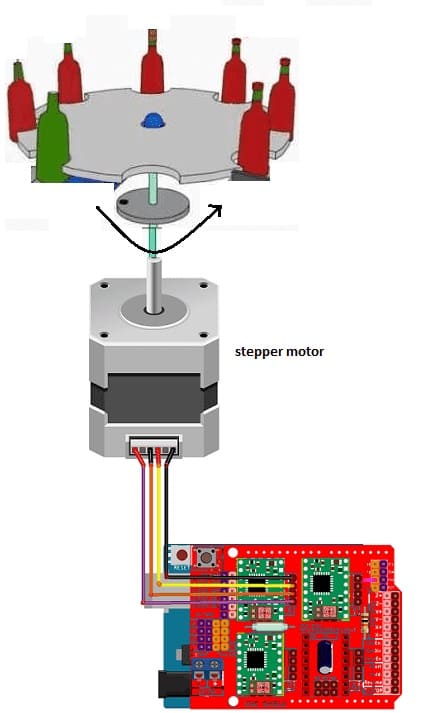
Le rôle du moteur pas à pas est de tourner le disque contenant les bouteilles. On branche le moteur pas à pas à la carte cnc qui est connectée à la carte Arduino.
3- Montage de la carte Arduino avec la pompe à eau
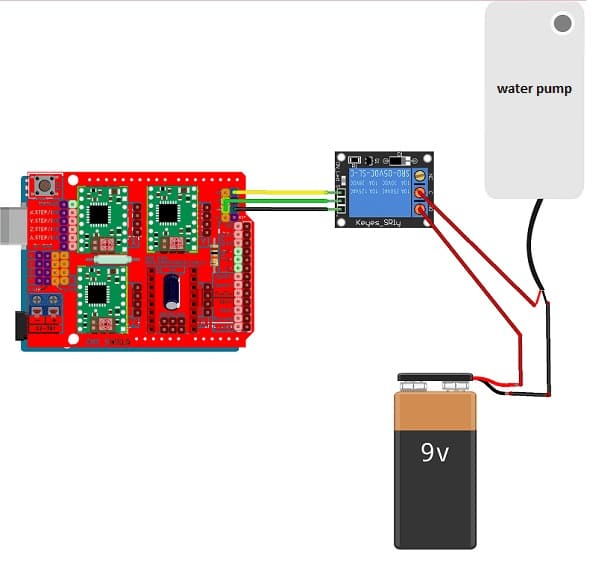
Le module relais et la pmope à eau
Broche S → A5 (SCL) de l'Arduino UNO
Broche VCC → 3V3 de l'Arduino UNO
Broche GND → GND de l'Arduino UNO
Broche NO → borne (+) de la batterie
Broche COM → borne (+) de la pompe à eau
borne (-) de la batterie → borne (-) de la pompe à eau
Programmation de la carte Arduino
Voici le programme qui permet de commander le système de remplissage automatique des bouteilles par la carte Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
int analogPin = A4;//le capteur infrarouge est connecté à la broche A4 de la carte Adruino int val; int nbr_bouteilles; // pour la configuration du moteur pas à pas const int StepX = 2; const int DirX = 5; int pulseWidthMicros = 1000; // microseconds int millisBtwnSteps = 15000; const int relais_moteur = A5; // le relais est connecté à la broche A5 de la carte Adruino void setup() { nbr_bouteilles=1; pinMode(relais_moteur, OUTPUT); pinMode(StepX,OUTPUT); pinMode(DirX,OUTPUT); Serial.begin(9600); } void loop() { if (nbr_bouteilles<=3) { val = analogRead(analogPin); // lire la valeur retournée par le capteur infrarouge if ((val < 10)&&(val > 0)) // si la bouteille est dans la bonne position { Serial.println(val); nbr_bouteilles++; digitalWrite(relais_moteur, HIGH); // demarrer la pompe à eau delay(9000); // remplissage pendant 9s digitalWrite(relais_moteur, LOW); // arret de la pompe à eau translationX(HIGH,LOW,100); // faire tourner le disque } else { translationX(HIGH,LOW,100); // faire tourner le disque } } } void translationX (uint8_t pin1, uint8_t pin2,int stepsPerRev1){ digitalWrite(StepX, pin1); // Enables the motor to move in a particular direction // Makes 200 pulses for making one full cycle rotation for (int i = 0; i < stepsPerRev1; i++) { digitalWrite(StepX, pin1); delayMicroseconds(pulseWidthMicros); digitalWrite(StepX, pin2); delayMicroseconds(millisBtwnSteps); } } |
Explications
KY-032 : Ce capteur détecte les objets en envoyant un signal infrarouge et en mesurant sa réflexion. Lorsque la bouteille est détectée, il envoie un signal bas (LOW) à l'Arduino.
Moteur pas à pas US-17H4401 : Il contrôle le déplacement précis du convoyeur pour aligner les bouteilles.
Pompe à eau : Commandée par un relais, elle fonctionne pendant une durée définie pour remplir les bouteilles.
Relais : Utilisé comme interrupteur pour activer et désactiver la pompe à eau.
1 commentaire

blasco 15-03-2525
salut salut!! je vous remercie pour ce projet bien argumenter, sa ma beaucoup aidé sur mon rapport de stage. mon problème est que le câblage fait ici est diffèrent de ma part puisque moi j'ai fais avec bouchage et je ne sais pas si vous pouvez m'aidé? je vous remercie
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente





