Détection d’obstacles avec la carte ESP32 et le capteur FC-51
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système de détection d'obstacles
4- Programmation de la carte ESP32
Présentation du projet
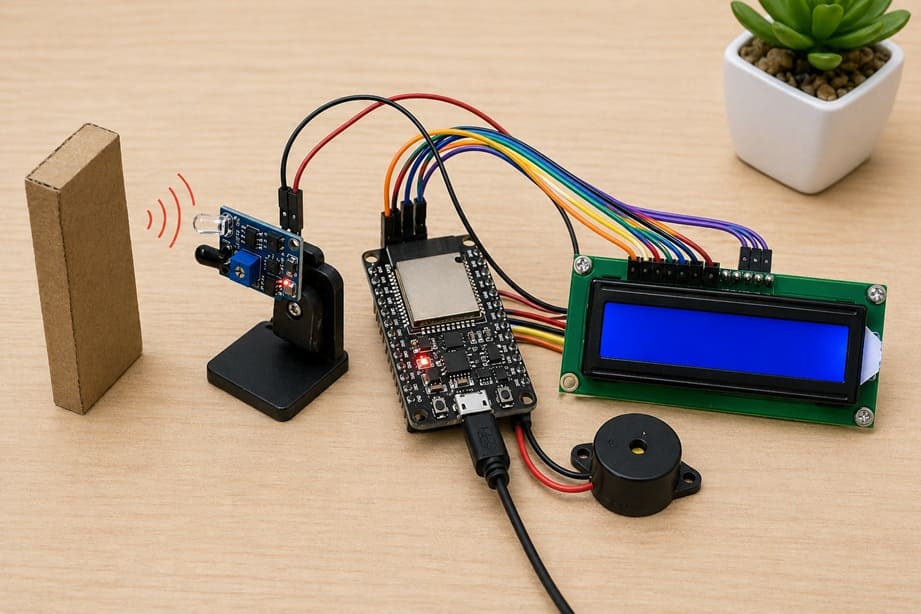
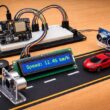
L’objectif de ce projet est de concevoir un système capable de détecter la présence d’un obstacle et d’alerter l’utilisateur en temps réel. Il utilise une ESP32 comme unité de contrôle, un capteur FC-51 pour la détection, un afficheur LCD I2C pour l’affichage, et un buzzer électronique pour l’alerte sonore.
Ce type de système est très utilisé dans des applications comme :
- les robots mobiles (éviter les collisions),
- les systèmes de sécurité,
- les dispositifs d’aide au stationnement.
Fonctionnement du système
Le fonctionnement repose sur la détection infrarouge du capteur FC-51. Ce capteur émet un faisceau infrarouge et mesure la réflexion de ce signal. Lorsqu’un objet se trouve devant le capteur, le signal est réfléchi et détecté.
La ESP32 lit en permanence l’état du capteur. Si aucun obstacle n’est détecté, le système reste en mode attente. Dès qu’un obstacle est présent à une distance proche, le capteur envoie un signal numérique à la carte.
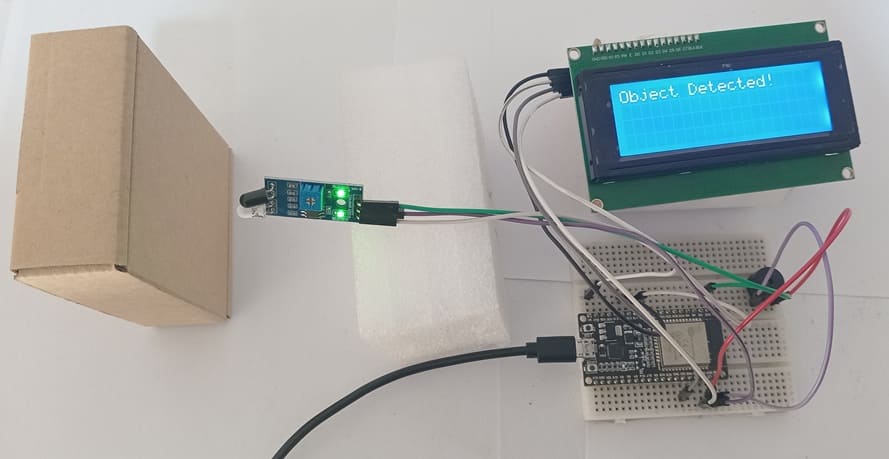
À ce moment-là, la carte traite l’information et déclenche deux actions simultanées. D’abord, elle affiche un message sur l’afficheur LCD I2C pour indiquer la présence de l’obstacle. Ensuite, elle active le buzzer électronique qui émet un signal sonore pour alerter l’utilisateur.
Lorsque l’obstacle disparaît, le capteur ne détecte plus de réflexion, et le système revient automatiquement à son état initial. L’affichage peut être mis à jour (par exemple “aucun obstacle”) et le buzzer s’arrête.
Matériel nécessaire
1- Carte ESP32

La carte ESP32 est un microcontrôleur puissant qui assure le traitement des données. Il lit les informations provenant du capteur, prend des décisions en fonction de ces données, puis contrôle les autres éléments comme l’afficheur et le buzzer. Grâce à ses nombreuses broches et à sa facilité de programmation, il est très adapté aux projets embarqués.
2. Capteur FC-51

Le capteur FC-51 est un capteur infrarouge utilisé pour détecter la présence d’un obstacle. Il fonctionne en émettant un signal infrarouge et en détectant sa réflexion sur un objet proche. Lorsqu’un obstacle est présent, le capteur envoie un signal numérique à l’ESP32. Il possède généralement un potentiomètre permettant d’ajuster la sensibilité et la distance de détection.
3. Afficheur LCD I2C
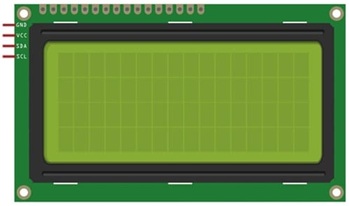
L’afficheur LCD I2C est utilisé pour afficher les informations du système. Il affiche les messages tels que « obstacle détecté » ou « aucun obstacle ».
4. Buzzer :
Le buzzer électronique est un composant qui produit un son lorsqu’il est activé. Dans ce projet, il sert d’alarme sonore pour avertir immédiatement l’utilisateur lorsqu’un obstacle est détecté. Il peut fonctionner de manière continue ou par impulsions selon le programme.
5. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
6- Breadboard (Plaque d'essai) :

Une breadboard est utile pour créer un circuit temporaire et connecter facilement les composants entre eux.
Schéma de câblage du système de détection d'obstacles
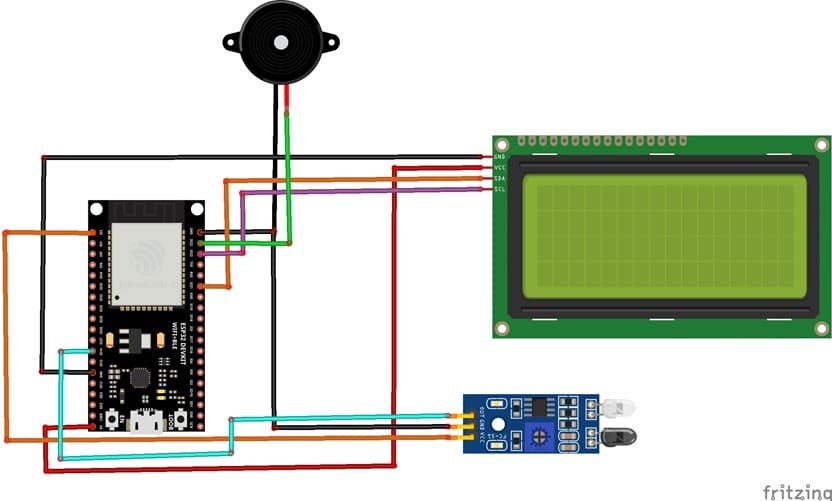
1- Connexion du capteur FC-51 à la carte ESP32
| Capteur FC-51 | Carte ESP32 |
|---|---|
| VCC | 3V |
| GND | GND |
| OUT | D14 |
2- Connexion de l’afficheur LCD I2C à la carte ESP32
| Afficheur LCD I2C | Carte ESP32 |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | D21 |
| SCL | D22 |
3- Connexion du Buzzer à la carte ESP32
| Buzzer | Carte ESP32 |
|---|---|
| Borne (+) | D23 |
| Borne (-) | GND |
Programmation de la carte ESP32
1- Ouvrir l’éditeur MakeCode (https://makecode.microbit.org/).
2- Commencez un nouveau projet.
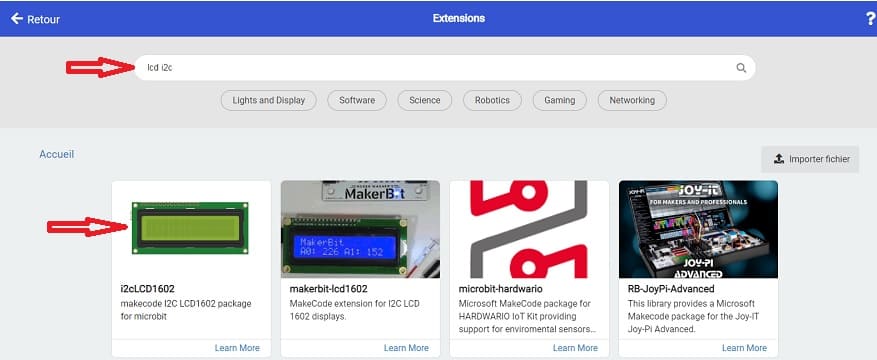
3- Ajoutez l'extension nécessaire pour utiliser un écran LCD. Pour cela, cliquez sur l'icône de la roue dentée en bas à gauche de l'éditeur, puis sélectionnez "Extensions". Recherchez et ajoutez l'extension "LCD I2C".
Ce programme réalisé avec MakeCode pour Micro:bit permet de détecter un obstacle à l’aide d’un capteur connecté à la broche P0, puis d’afficher un message sur un écran LCD I2C et de générer un signal sonore.
Explication du programme :
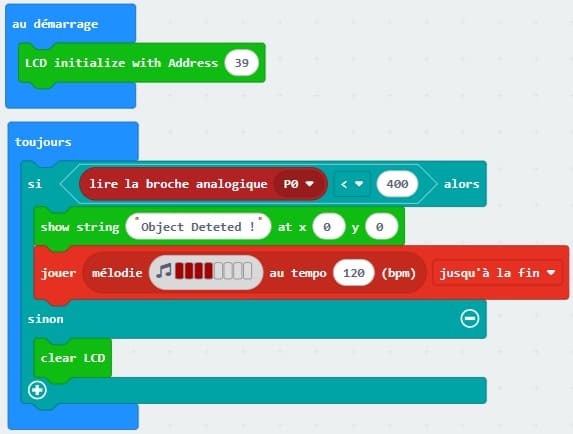
Au début du programme, l’instruction I2C_LCD1602.LcdInit(39) initialise l’afficheur LCD I2C. La valeur 39 correspond à l’adresse I2C du module (0x27 en hexadécimal), ce qui permet à la carte Micro:bit de communiquer correctement avec l’écran via le bus I2C.
Ensuite, le programme entre dans une boucle infinie grâce au bloc toujours. Cela signifie que la Micro:bit exécute en permanence les instructions contenues dans cette boucle, assurant ainsi une surveillance continue de l’environnement.
À chaque itération, la carte lit la valeur analogique provenant de la broche P0 avec l’instruction lire la broche analogique (P0). Cette valeur dépend du signal fourni par le capteur FC-51. Un seuil est fixé à 400 pour distinguer la présence ou l’absence d’un obstacle.
Si la valeur mesurée est inférieure à 400, cela indique qu’un obstacle est détecté. Dans ce cas, le programme affiche le message "Object Deteted !" sur la première ligne de l’écran LCD à partir de la position (colonne 0, ligne 0). Ensuite, un signal sonore est émis grâce à la fonction music.play, qui joue une séquence de notes (C5 répétée) à un tempo de 120 battements par minute. Le mode UntilDone bloque l’exécution du programme jusqu’à la fin du son.
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents




Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






