Projet de robinet automatique à commande Arduino UNO
Plan de tutoriel
1- Présentation du projet
2- Matériel nécessaire
3- Schéma de câblage du système
4- Programmation de la carte Arduino UNO
Présentation du projet
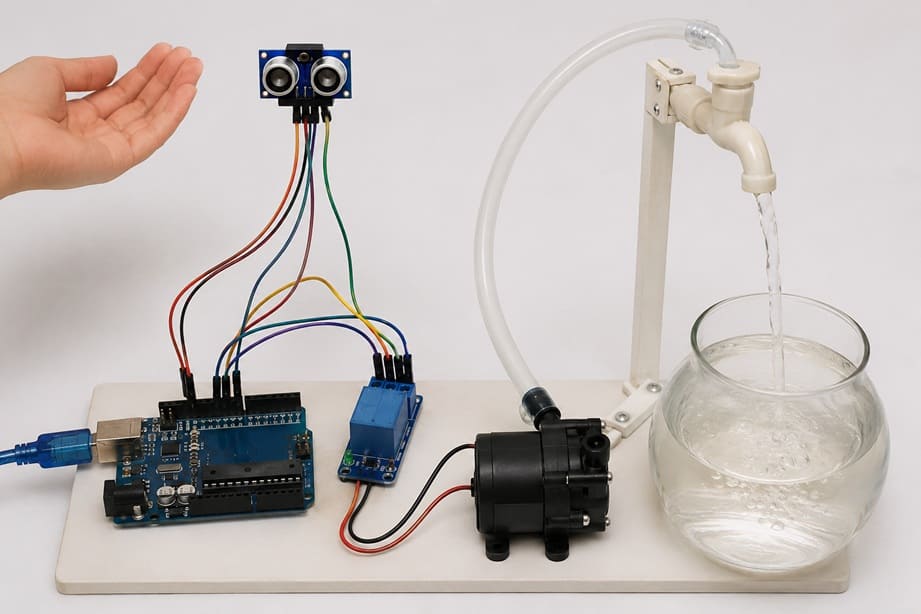
Ce projet a pour objectif de réaliser un robinet automatique sans contact à l'aide d'une carte Arduino UNO. Il permet de distribuer de l'eau automatiquement lorsqu'une main ou un récipient est détecté à proximité du capteur. Cette solution contribue à améliorer l'hygiène, à réduire le gaspillage d'eau et à automatiser la distribution de l'eau dans différents environnements tels que les maisons, les écoles ou les laboratoires.
Fonctionnement du projet
Le système repose sur un capteur ultrasonique HC-SR04 qui mesure en permanence la distance entre lui et un objet placé devant lui. Lorsqu'une main ou un verre est détecté à une distance prédéfinie, l'Arduino UNO traite l'information reçue du capteur et active le module relais.
Le relais agit comme un interrupteur électronique permettant de commander la pompe à eau 12 V. Une fois activée, la pompe aspire l'eau contenue dans le bocal en verre et la fait circuler à travers le tuyau plastique jusqu'à la sortie du robinet. L'eau s'écoule alors automatiquement vers le récipient placé devant le système.
Lorsque la main ou le récipient est retiré et que le capteur ne détecte plus aucun objet à proximité, l'Arduino désactive le relais. La pompe s'arrête immédiatement et l'écoulement de l'eau cesse automatiquement. Le système fonctionne ainsi de manière autonome, rapide et efficace, sans nécessiter de contact physique avec le robinet.
Matériel nécessaire
1- Carte Arduino UNO

L'Arduino UNO est la carte de commande du système. Elle exécute le programme chargé dans sa mémoire, lit les mesures du capteur HC-SR04 et commande le module relais pour activer ou arrêter la pompe à eau selon la présence d'un objet détecté.
2. Capteur ultrasonique HC-SR04

Le HC-SR04 est un capteur de distance utilisant des ondes ultrasoniques. Il mesure la distance entre le système et une main ou un récipient placé devant lui. Les informations recueillies sont envoyées à l'Arduino UNO pour prendre les décisions appropriées.
3. Module relais

Le module relais joue le rôle d'un interrupteur électronique commandé par l'Arduino UNO. Il permet à la carte de contrôler en toute sécurité l'alimentation de la pompe à eau de 12 V, même si celle-ci fonctionne sous une tension différente de celle de l'Arduino.
4. Pompe à eau de 12 V

La pompe à eau 12 V assure le déplacement de l'eau depuis le bocal vers la sortie du robinet. Elle est activée lorsque le relais reçoit l'ordre de l'Arduino UNO et s'arrête dès que la détection cesse.
5. Câbles de Connexion (Jumper Wires)

Les fils de connexion permettent de relier les différents composants entre eux.
Schéma de câblage du système du système
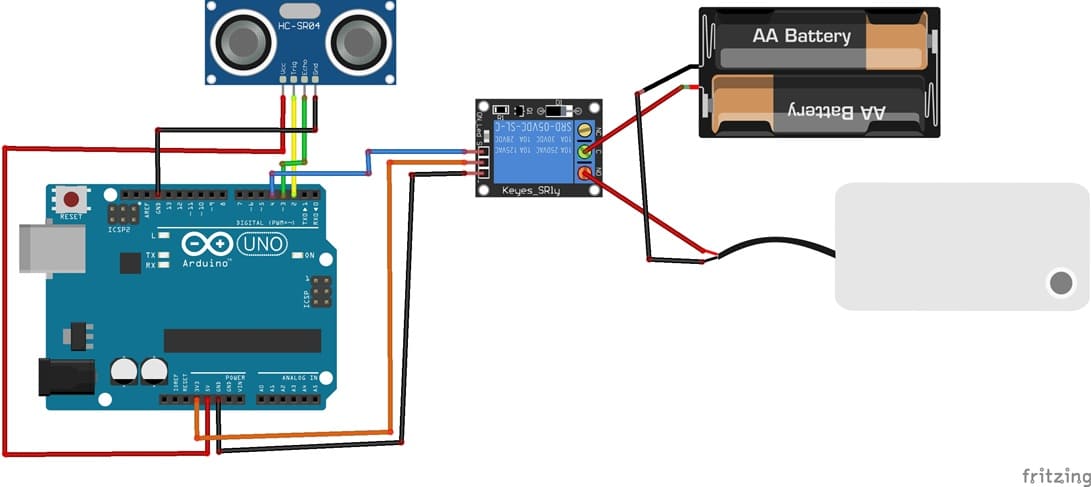

1- Connexion du capteur HC-SR04 à la carte Arduino UNO
| Capteur HC-SR04 | Arduino UNO |
|---|---|
| VCC | 5V |
| GND | GND |
| Trig | D2 |
| Echo | D3 |
2- Connexion du module relais à la carte Arduino UNO
| Module relais | Arduino UNO |
|---|---|
| Broche positive (+) | 3V |
| Broche négative (-) | GND |
| Broche (S) | D4 |
3- Connexion de la pompe à eau
| Fil rouge (+) | Broche NO (Module relais) |
| Fil noir (-) | Borne négative (de deux plies de 3.7V) |
4- Connexion de deux piles de 3.7V au module relais
| deux piles | Module relais |
|---|---|
| Fil rouge (+) | Broche COM |
Programmation de la carte Arduino UNO
Ce programme utilise un capteur ultrasonique HC-SR04 pour détecter la présence d'un objet à une distance inférieure ou égale à 6 cm. Lorsque cette condition est remplie, l'Arduino UNO active un module relais connecté à la broche D4. Le relais peut alors commander un équipement externe, comme une pompe à eau ou une lampe. Lorsque l'objet s'éloigne au-delà de 6 cm, le relais est désactivé. Le système fonctionne ainsi de manière automatique en fonction de la distance mesurée par le capteur.
Vous devez importer cette bibliothèque Ultrasonic pour utiliser la capteur HC-SR04.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 |
// ====================================================== // Importation des bibliothèques nécessaires // ====================================================== #include "Ultrasonic.h" // Bibliothèque pour le capteur ultrasonique HC-SR04 #include <Servo.h> // Bibliothèque pour le servomoteur (non utilisée ici) // ====================================================== // Déclaration et initialisation des composants // ====================================================== // Création de l'objet capteur ultrasonique // Trig connecté à la broche D2 // Echo connecté à la broche D3 Ultrasonic ultrasonic(2, 3); // Variable de position du servomoteur // (déclarée mais non utilisée dans ce programme) int pos = 0; // ====================================================== // Fonction d'initialisation // ====================================================== void setup() { // Démarrer la communication série à 9600 bauds // pour afficher les mesures de distance Serial.begin(9600); // Configurer la broche D4 comme sortie // Cette broche commande le module relais pinMode(4, OUTPUT); } // ====================================================== // Boucle principale // ====================================================== void loop() { // Lire la distance mesurée par le capteur HC-SR04 // en centimètres int distance = ultrasonic.Ranging(CM); // Afficher la distance sur le moniteur série Serial.print("Distance = "); Serial.print(distance); Serial.println(" cm"); // Vérifier si un objet est détecté // à une distance inférieure ou égale à 6 cm if (distance <= 6) { // Activer le relais // Le relais alimente la charge connectée // (pompe à eau, lampe, etc.) digitalWrite(4, HIGH); } else { // Désactiver le relais lorsque // aucun objet n'est détecté à proximité digitalWrite(4, LOW); } // Attendre 300 ms avant la prochaine mesure delay(300); } |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente






