Système de détection d’obstacles basé sur HC-SR04 et ESP32
Plan du tutoriel
Introduction
1- Principe de fonctionnement du système de détection d’obstacles basé sur HC-SR04 et ESP32
2- Les composants nécessaires du système
3- Schéma de câblage du système de détection d'obstacles
4- Programmation de la carte ESP32 avec Micropython
Introduction
Un système de détection d'obstacles est une technologie conçue pour identifier et localiser des objets ou des obstacles dans un environnement donné. Ces systèmes sont couramment utilisés dans divers domaines tels que l'automobile, la robotique, la surveillance, les drones, etc. Voici quelques éléments clés liés aux systèmes de détection d'obstacles :
1- Capteurs :
Capteurs ultrasoniques : Mesurent la distance en utilisant des ondes sonores.
Capteurs infrarouges : Détectent la chaleur émise par les objets.
Caméras : Captent des images vidéo pour l'analyse d'images.
Lidar (Light Detection and Ranging) : Utilise des lasers pour mesurer la distance et créer une carte 3D de l'environnement.
Radar : Utilise des ondes radio pour détecter la présence et la distance des objets.
2- Traitement des données :
Les données des capteurs sont traitées pour extraire des informations pertinentes sur la position, la taille et la nature des obstacles.
Des algorithmes de traitement du signal, de vision par ordinateur et d'apprentissage automatique peuvent être utilisés pour améliorer la précision de la détection.
3- Algorithme de détection :
Les algorithmes de détection d'obstacles peuvent varier en fonction du type de capteurs utilisés et des exigences spécifiques du système.
Les approches peuvent inclure des seuils de détection, des modèles prédictifs, des réseaux de neurones, etc.
4- Système d'alerte :
Une fois un obstacle détecté, le système peut déclencher des alertes visuelles, sonores ou haptiques pour avertir l'utilisateur ou activer des systèmes d'évitement automatique.
5- Applications :
Les systèmes de détection d'obstacles sont largement utilisés dans les voitures autonomes pour éviter les collisions.
Ils sont également présents dans les robots industriels pour assurer un mouvement sécurisé.
Les drones utilisent ces systèmes pour éviter les collisions avec des objets fixes ou mobiles.
6- Limitations :
Les conditions météorologiques, l'éclairage et d'autres facteurs environnementaux peuvent influencer les performances des capteurs.
Certains obstacles peuvent ne pas être détectés en raison de leur taille, de leur matériau ou d'autres caractéristiques spécifiques.
En résumé, les systèmes de détection d'obstacles jouent un rôle crucial dans la sécurité et la navigation des véhicules autonomes, des robots et d'autres dispositifs autonomes, en contribuant à prévenir les accidents et à assurer un déplacement sûr dans divers environnements.
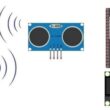
Principe de fonctionnement du système de détection d’obstacles basé sur HC-SR04 et ESP32
Le HC-SR04 est un capteur à ultrasons populaire qui mesure la distance en utilisant des ondes sonores. L'ESP32 est un microcontrôleur WiFi et Bluetooth très utilisé. En combinant ces deux composants, on peut créer un système de détection d'obstacles basé sur la mesure de distance par ultrasons. Voici le principe de fonctionnement de ce système :
Montage matériel :
Connectez le HC-SR04 à l'ESP32. Le HC-SR04 a quatre broches : VCC, Trig (déclenchement), Echo (écho) et GND. Connectez VCC au 5V de l'ESP32, GND à la masse, Trig à une broche de sortie de l'ESP32 et Echo à une broche d'entrée de l'ESP32.
Connectez un buzzer à une broche de sortie de l'ESP32 et à la masse.
Connectez une LED à une autre broche de sortie de l'ESP32 et à une résistance, puis à la masse.
Fonctionnement du système :
Le HC-SR04 émet des ondes ultrasonores lorsqu'il reçoit un signal de déclenchement (Trig).
Ces ondes ultrasonores se propagent dans l'air et rebondissent sur un objet. Lorsque l'onde rebondit, le HC-SR04 reçoit le signal d'écho (Echo).
La durée entre l'envoi du signal de déclenchement et la réception du signal d'écho est proportionnelle à la distance entre le capteur et l'objet.
Si la distance mesurée par le HC-SR04 est inférieure à 4 centimètres, le buzzer et la LED sont activés pour signaler la proximité d'un obstacle.
Programmation de l'ESP32 :
Utilisez un langage de programmation comme Thonny (en utilisant le langage Micropython) pour programmer l'ESP32.
Configurez la broche de déclenchement (Trig) comme une sortie et la broche d'écho (Echo) comme une entrée.
Envoyez un signal de déclenchement, mesurez le temps entre l'émission et la réception du signal d'écho, puis utilisez cette durée pour calculer la distance.
Les composants nécessaires du système
Carte ESP32 :
L'ESP32 est un microcontrôleur à faible consommation d'énergie, doté de fonctionnalités Wi-Fi et Bluetooth intégrées. Il est largement utilisé dans le domaine de l'IoT (Internet des Objets), du développement de projets embarqués et dans d'autres applications nécessitant une connectivité sans fil et un traitement de données sur une petite échelle.
Capteur HC-SR04 :

Le capteur ultrason HC-SR04 est un dispositif électronique utilisé pour mesurer la distance entre le capteur et un objet en utilisant des ondes ultrasonores.
Buzzer

Un buzzer est un composant électronique qui produit un son lorsqu'il est alimenté en courant électrique. Il est souvent utilisé pour émettre des signaux sonores dans divers dispositifs électroniques.
L'intégration d'un buzzer dans un système de détection d'obstacles permet d'ajouter un avertissement sonore lorsqu'un obstacle est détecté.
LED
![]()
L'utilisation d'une LED dans un système de détection d'obstacles peut fournir un indicateur visuel lorsque le capteur détecte la proximité d'un objet.
Résistance
![]()
Lorsque vous utilisez une LED dans un circuit, il est généralement nécessaire d'ajouter une résistance en série avec la LED pour limiter le courant qui la traverse. Cela protège la LED et évite qu'elle ne soit endommagée en raison d'un courant excessif.
Fils de connexion :

Pour établir les connexions physiques entre la carte ESP32 et le capteur HC-SR04 Assurez-vous d'avoir des fils de bonne qualité pour des connexions stables.
Plaque d'essai (Breadboard) :

On utilise la plaque d'essai pour faciliter le câblage des différents composants.
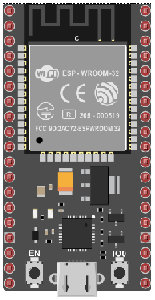
Schéma de câblage du système de détection d'obstacles
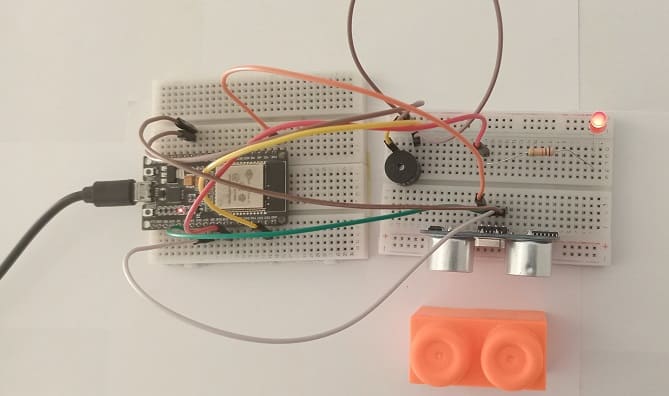
1- Connexion du capteur HC-SR04 à la carte ESP32
Connecter la broche VCC du capteur HC-SR04 à la broche 3.3V de la carte ESP32.
Connecter la broche GND du capteur HC-SR04 à la broche GND de la carte ESP32.
Connecter la broche Trig du capteur HC-SR04 à la broche GPIO16 de la carte ESP32.
Connecter la broche Echo du capteur HC-SR04 à la broche GPIO17 de la carte ESP32.
2- Connexion du buzzer à la carte ESP32
Connecter la borne (+) du buzzer à la broche GPIO23 de la carte ESP32.
Connecter la borne (-) du buzzer à la broche GND de la carte ESP32.
3- Connexion de la LED à la carte ESP32
Connectez une résistance en série avec la LED: La résistance est connectée entre la broche GPIO19 et la borne positive (anode) de la LED.
Connectez la borne négative (cathode) de chaque LED à la masse (GND) de la carte ESP32.
Programmation de la carte ESP32 avec Micropython
La programmation de la carte ESP32 avec MicroPython pour commander un système de détection d'obstacles avec HC-SR04, LED et buzzer peut être effectuée en utilisant le langage MicroPython.
Pour ce faire:
1- vous devez disposer d'un environnement MicroPython installé sur votre ESP32.
2- Flashez votre ESP32 avec MicroPython en utilisant Firmware esp32-20210902-v1.17.bin.
3- Importez la bibliothèque hc-sr04 pour le capteur ultrason HC-SR04
4- Écrivez le code suivant :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
import machine from machine import Pin from hcsr04 import HCSR04 import time sensor = HCSR04(trigger_pin=16,echo_pin=17,echo_timeout_us=1000000) redled_pin=Pin(19, Pin.OUT) buzzer_pin=Pin(23, Pin.OUT) while True: # claculer la distance distance = sensor.distance_cm() print('distance= ',distance,' cm') if (distance<4): # si le HC-SR04 detecte un obstacle redled_pin.value(1) # allumer LED buzzer_pin.value(1) # faire sonner le buzzer else: redled_pin.value(0) # eteindre LED buzzer_pin.value(0) # arreter le buzzer time.sleep_ms(100) |
0 commentaire
laisser un commentaire
Passion de robotique

Tutoriels récents





Atelier robotique

Tutoriels populaires





Construction des robots

Tutoriels plus commentés




Bras robotique

Categories
Maison intelligente